



















Turtlebot仿真-测试Turtlebot仿真器
测试Turtlebot仿真器
- 我们假设您已经完成了安装步骤。
- 一个turtlebot运行Gazebo
- 打开一个终端,输入以下命令:
roslaunch turtlebot_gazebo turtlebot_world.launch
- 注意:当您启动Gazebo 首次可能需要几分钟来更新模型数据库。
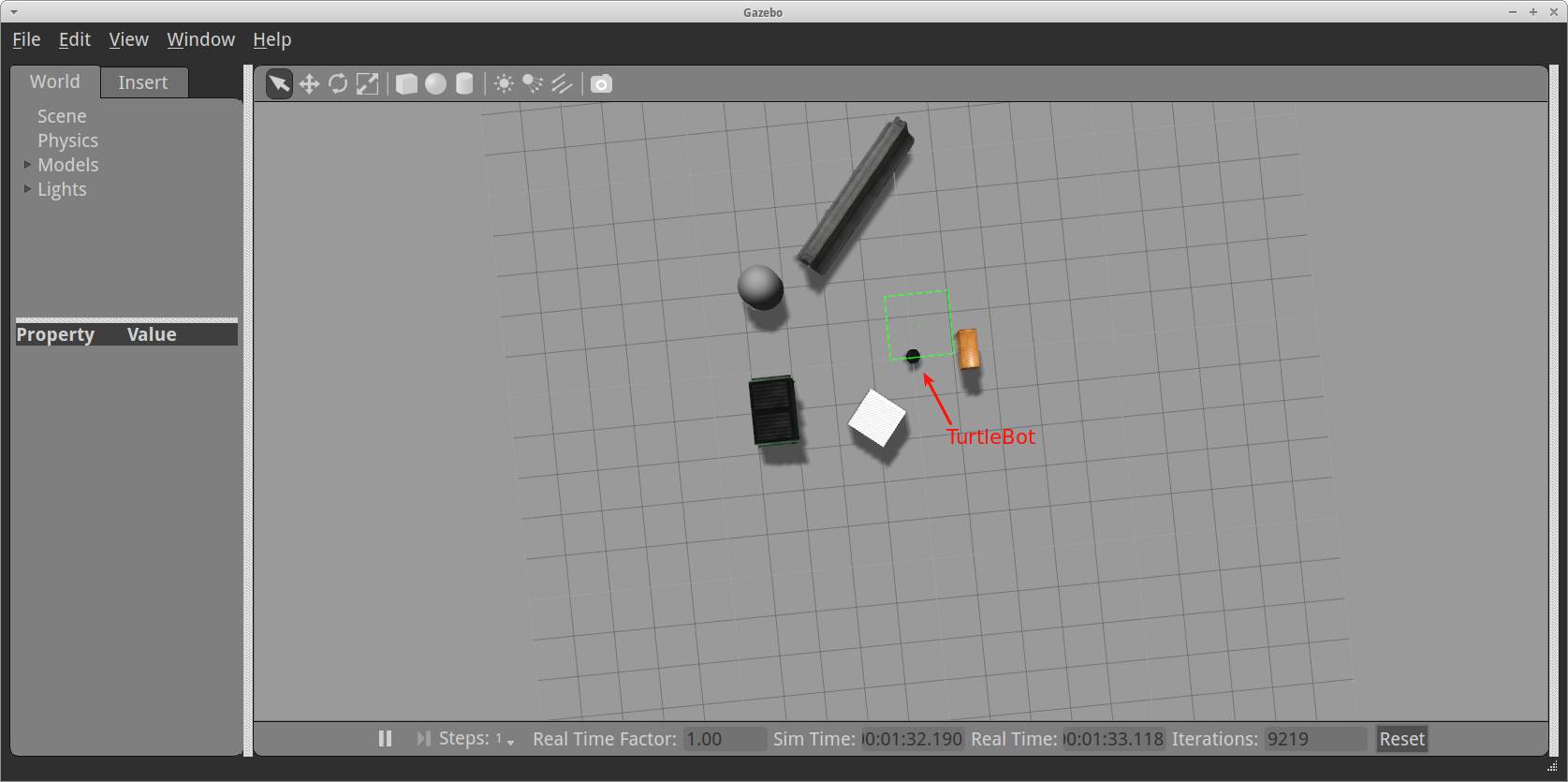
- 你会看到一个环境,称为Gazebo的世界,与turtlebot和其他一些对象。
- 场景是模拟器的主要部分,对象是动态的,你可以与环境进行交互。
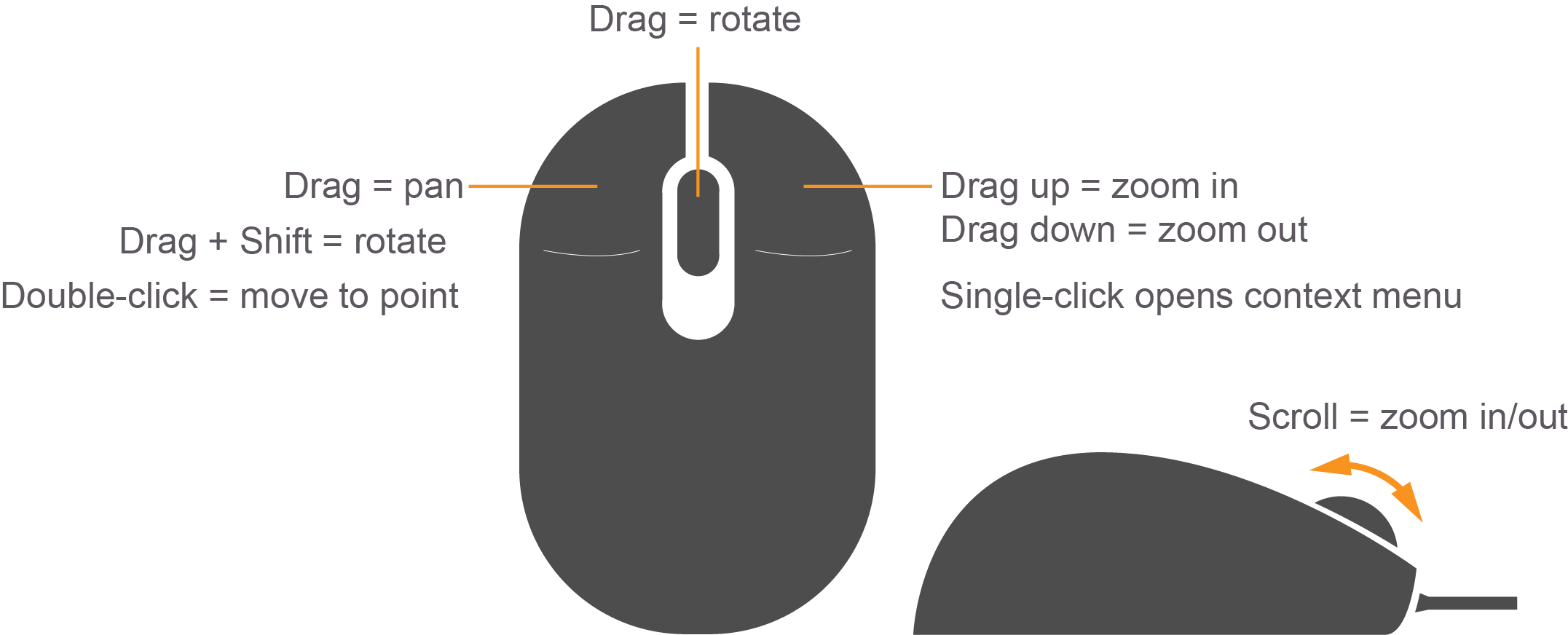
- 我们强烈推荐带有滚轮的鼠标,你可以看到基本的鼠标操作,对于导航和视图切换。
- 注意:从图形用户界面(GUI)关闭gazebo将不关闭其他过程产生roslaunch。
- 如果你需要关闭的工作台,按Ctrl + C在同一个终端窗口。
运行rviz
- rviz是ROS的三维可视化环境。
- rviz让我们看到机器人怎么看,怎么思考和怎么做。
- 可视化和测试传感器信息是开发和调试的一个重要组成部分。
- 而Gazebo是运行在一个新的终端,启动Rviz:
roslaunch turtlebot_rviz_launchers view_robot.launch
- 你会看到一个turtlebot:
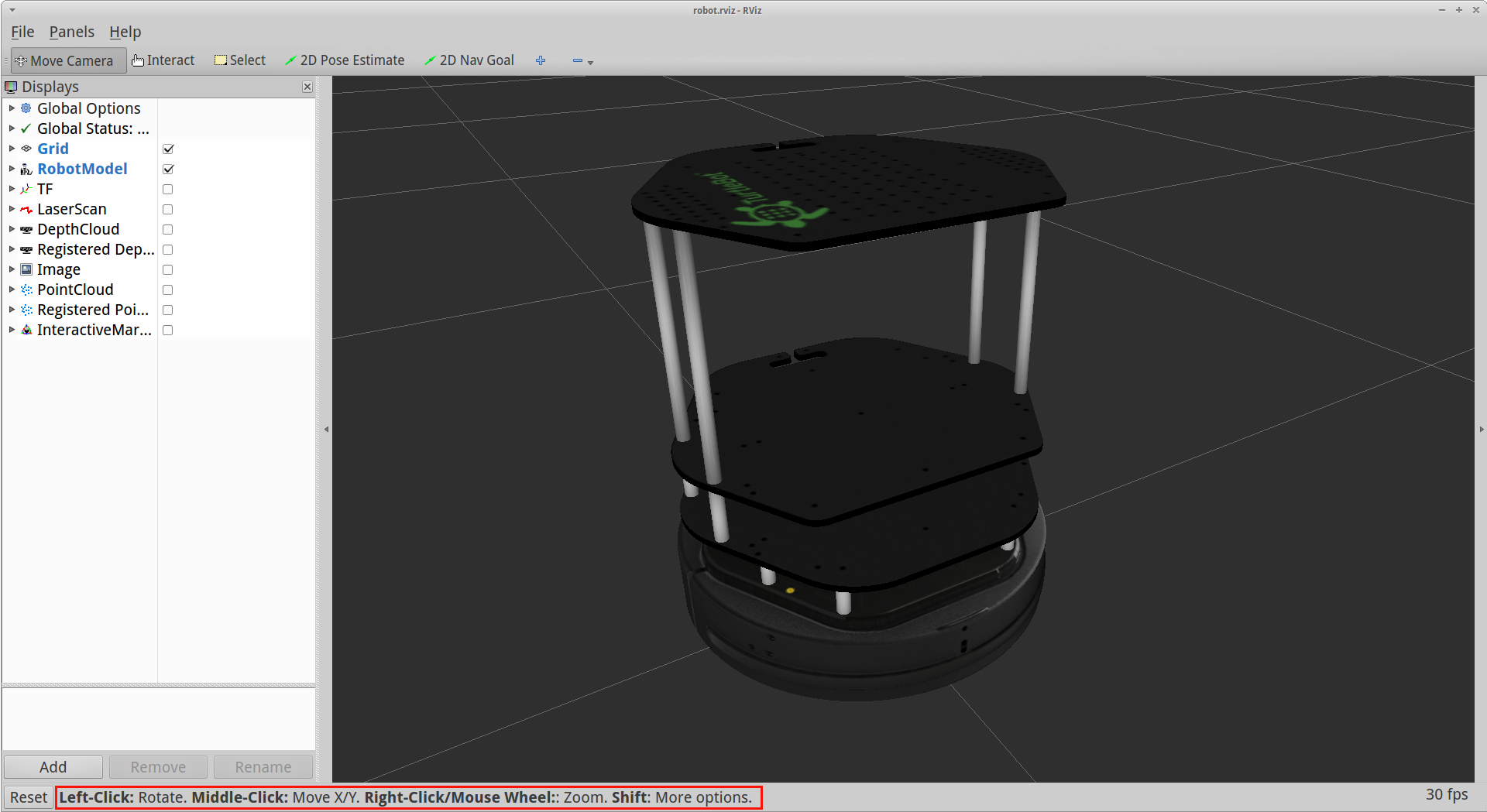
- 你可以在图片上看到如何使用一个轮式鼠标导航。
按照下面的步骤,看看机器人看到什么:
- 旋转相机,直到你可以从后面的turtlebot。
DepthCloud选项从左栏,你会看到turtlebot的深度视觉。
- 启用
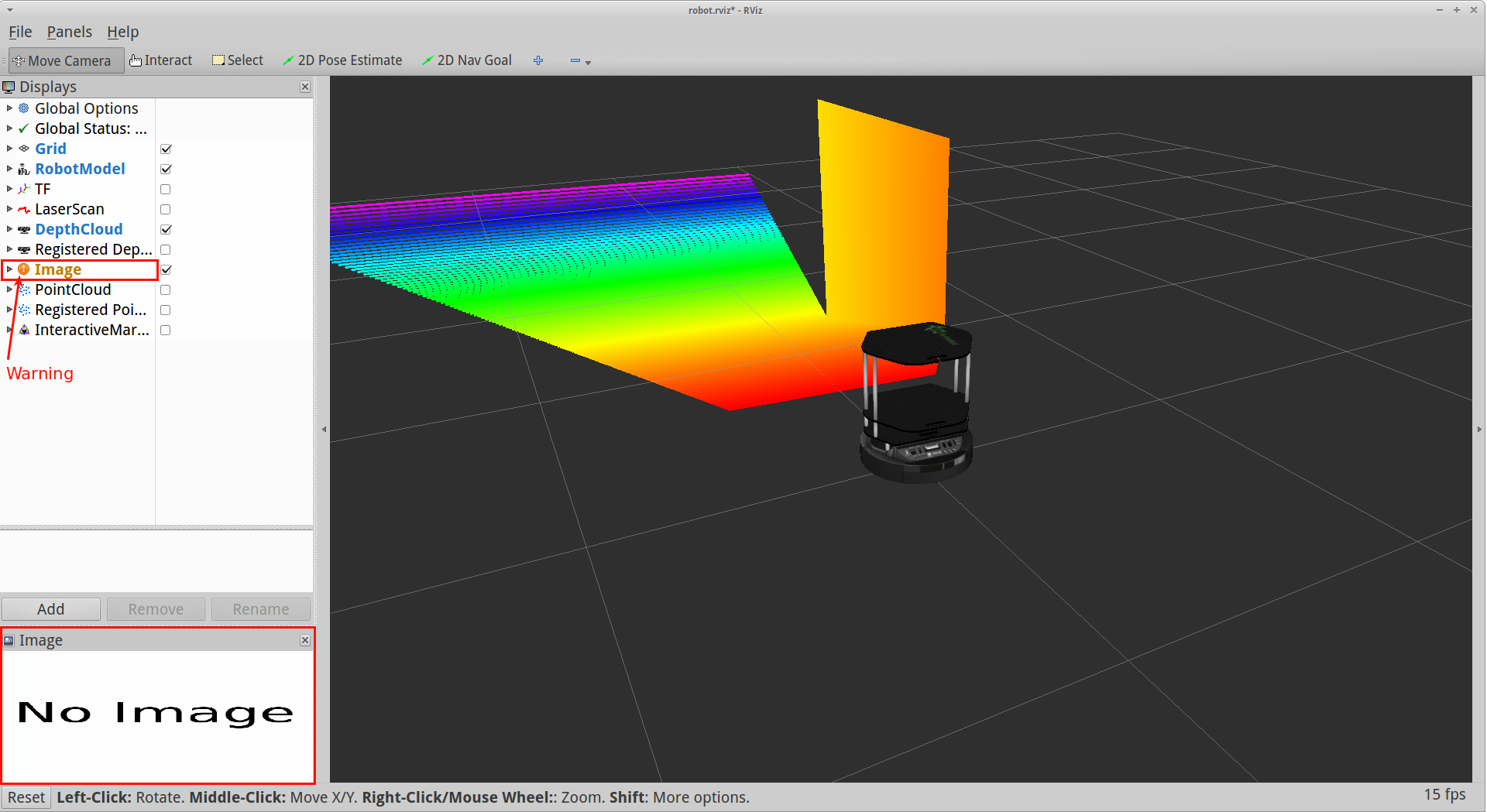
Image左栏的图像选项。
- 启用
注:你可能会有一个警告这一步。
该问题是,图像的默认主题不支持通过仿真。
你可以看到一个图像与警告下面。转到下一步选择合适的主题。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号