



















Turtlebot入门-测试Turtlebot安装
测试Turtlebot安装(Turtlebot和工作站)
名称概念
- Turtlebot只指底盘+kinect+托盘+支架的合体。
- 跟turtlebot相连的电脑称为:上网本
- 远程到上网本的称为:工作站、工作机
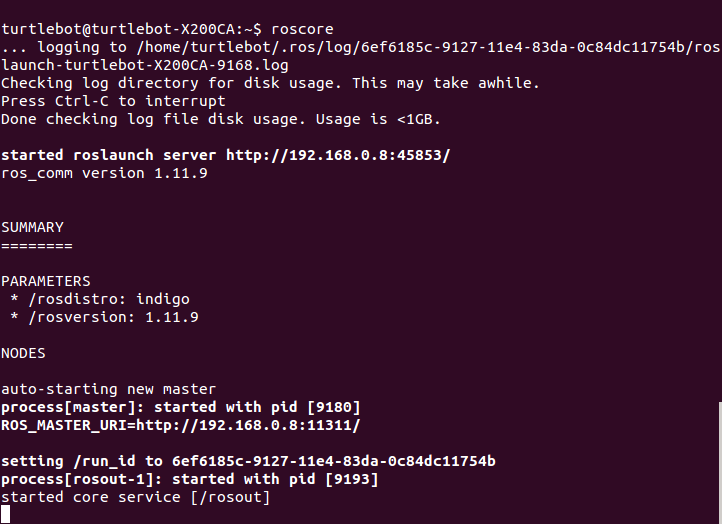
在上网本,新开终端输入
roscore
如果ROS安装正确显示
started core service [/rosout]
如图:
如有问题,请检查安装步骤!
检查别名:
- 输入检测命令:
ls /dev/kobuki
会显示有对应的设备
/dev/kobuki如果没有,添加别名:
rosrun kobuki_ftdi create_udev_rules
- 重插USB线,在进行上述的检测命令
参数配置:
- minimal.launch中包含如下的一些参数需要作配置
<arg name="base" value="$(arg base)" />
<arg name="stacks" value="$(arg stacks)" />
<arg name="3d_sensor" value="$(arg 3d_sensor)" /> #rplidar,asua_xtion_pro,kinect2等
<arg name="serialport" value="$(arg serialport)" /> #底盘的设备端口,如/dev/ttyUSB0
- 可以通过在~/.bashrc中设置
- 为TURTLEBOT_BASE,TURTLEBOT_STACKS,TURTLEBOT_3D_SENSOR,TURTLEBOT_SERIAL_PORT赋值
echo "export TURTLEBOT_BASE=kobuki" >> ~/.bashrc
echo "export TURTLEBOT_STACKS=hexagons" >> ~/.bashrc
echo "export TURTLEBOT_3D_SENSOR=kinect" >> ~/.bashrc
echo "export TURTLEBOT_SERIAL_PORT=/dev/kobuki" >> ~/.bashrc
echo "export TURTLEBOT_BATTERTY=none" >> ~/.bashrc
通过遥控移动(仅TurtleBot,通过Turtlebot的上网本操作)
打开Turtlebot开关,状态点亮。
启动Turtlebot,在上网本,打开一个新终端,运行如下命令:
roslaunch turtlebot_bringup minimal.launch
- 启动键盘遥控,在上网本,打开另一个新终端,运行如下命令:
roslaunch turtlebot_teleop keyboard_teleop.launch
- 点击键盘“i”前进。
通过发布主题命令
- 命令:
rostopic pub -r 10 /cmd_vel_mux/input/navi geometry_msgs/Twist '{linear: {x: 0.1, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号