



















Pixhawk无人机教程-6.13 相机云台
相机云台
目录
- 相机云台与舵机
- 把舵机连接至APM2
- 把舵机连接至Pixhawk
- 把PX4连接至舵机
- 通过Mission Planner配置云台
- 有关相机使用问题的调试
- 配置快门
相机云台与舵机
APMCopter,APMPlan或APMRover,可以通过任何剩余通道控制,用以稳定云台。同时,也可以把自稳和飞手的输入指令结合起来用(通常使用通道6的调谐旋钮)。
下面的例子是APMCopter的截屏,但是同Plane和Rover完全一样。
如果连接了舵机,照相机的快门也可以由APM触发,或用“继电器”触发。触发快门的动作可以通过你的接收机的开关7通道或者任务自动控制。
警告:请勿将舵机电源(红)和地(黑)导线连接到RC10(A10)和RC11(A11),这样舵机的运动可能会导致APM掉电。去掉JP1跳线冒,从外部BEC或从APM的后部电源插针给舵机供电。更多细节在下面的连接舵机到APM的部分。警告:请确保在增加了的额外重量后(相机云台),理论上稳定模式下悬停油门仍在50%左右,且不超过70%,因为多轴动力不足时,遇干扰恢复能力也比较差。
把舵机连接至APM2
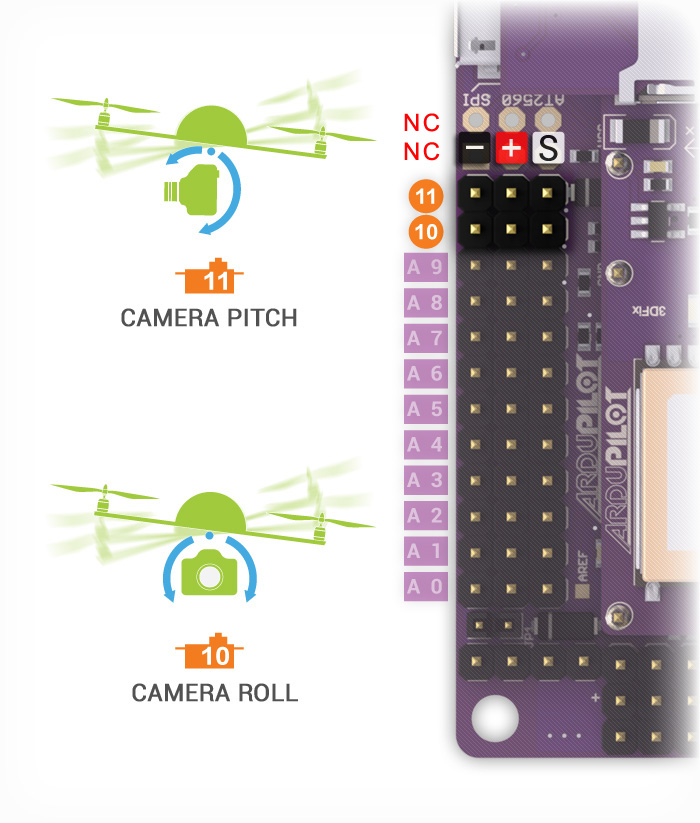
云台的roll和pitch舵机信号线(只是信号线!)应该连接至A10和A11靠右引脚(如下图所示的符号S)。
非常重要 1:APM2旁边的丝印有可能不能准确地与针脚对齐。
非常重要 2:下面的图示显示了2行的SPI引脚(图中标有“NC”),没有插入针脚,但大多数的APM2.X主板还是有插入针脚的。
非常重要 3:标记NC的一定不要插入针脚。
如果有舵机,可以把云台的roll/tile连接到RC5到RC8输出,前提是未被使用时。
请勿将舵机电源(红)和地(黑)导线连接到RC10(A10)和RC11(A11),这样舵机的运动可能会导致APM掉电。去掉JP1跳线冒,从外部BEC或从APM的后部的电源插针给舵机供电。
注意:APM2.x RC10和RC11输出频率为50Hz(标记为A10和A11),可以控制模拟或数字舵机,而RC1到RC8输出在490hz,理论上只适用于数字伺服系统。
把舵机连接至Pixhawk
连接云台至Pixhawk的辅助输出引脚(AUX)。连接倾斜(pitch)至aux信号输出脚1,roll连接到aux信号输出脚2,地线连接到aux信号输出地线上。

把PX4连接至舵机
相机云台舵机连接口(FMU USART2)在PX4IO板上。
5引脚插针在PX4IO板边上,在伺服连接器相反的一端,处于板子的边缘。
相机云台roll舵机信号输出信号线,应连接到引脚2(RC9)。
相机云台pitch舵机输出信号信号线,应连接到引脚3(RC11)。
如果你的相机云台有yaw信号线,应连接到引脚4(RC12)。
单独给舵机提供电源和地。
通过Mission Planner配置云台
在配置菜单,硬件选项,你会发现一个相机云台设置屏幕。(见下图)
给云台的每个舵机/轴选择合适的通道,并确保“Stabilise”复选框被选中。
舵机限值应调整,以确保在云台舵机不受限制。
角度限值应设置,为对应机架本身的舵机限度的倾斜角度。如果你测试云台时,云台并没有正确的保持稳定(例如它在你倾斜多轴时过倾或修正不足),就向上或向下微调角度的限制。
(这并不是真的“角度”的限制,而是给出了舵机机在60°运动极限内的运动范围的大小。
例如,如果设置为-60 / +60,在飞行器达到-60°/ +60°时,舵机将达到-30°/ +30°(极限)
如果设置为-15 / +15,飞行器达到-15°/ +15°时舵机将达到-30°/ +30°(极限)
“收回角”指当装载的模式是“retracted”(即:MNT_MODE=0),云台的角度位置。“收回”通常是指当云台被拉入飞机机体,对于多轴来说,通常没有太大的用处。
“中性角”指的是安装云台的初始位置。通常指的面朝正前的方向。
“控制角”指的是通过地面站或者遥杆来控制云台的参数。这些值会被地面站覆盖,所以在任务规划器界面上更新他们没有任何意义。
如果你发现你的云台向错误的方向转动,检查反向复选(Reverse)框。

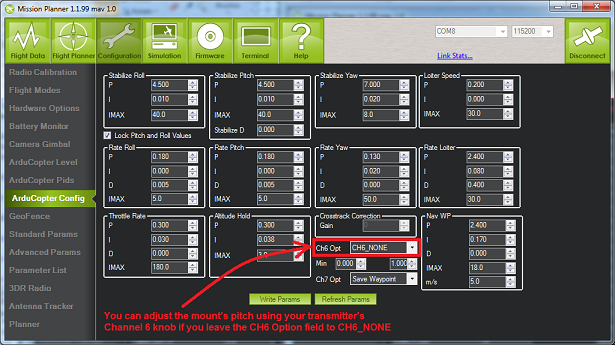
如果你想要飞行时调整云台的侧倾,roll或pan(平移),设置输入为通道“RC6”,通常是指遥控器调谐旋钮。!注意!如果你这样做的话,你需要在Mission Planner的“标准参数” – >“设置”页面把你的6通道选项设为“CH6_NONE”。
有关相机使用问题的调试
果冻效应(或滚动快门),是使用CMOS摄像头(GoPro等)的一个副作用,是由于桨/马达的震动而引起的。可以通过在相机上安装软橡胶、矽胶、泡沫塞或尼龙搭扣得到改善。
CCD相机一般使用帧曝光,没有“卷帘式快门”效应,振动和摄像头的移动仍将产生不良影响。
由于模型的高频异步振动,许多相机的数字信号,甚至光学系统稳定性,也变的不如应用程序中预想的稳定。
但也有例外:即使在最大30电子变焦,索尼相机的拍摄平衡稳定系统是很出色的。
如果你的相机移动有些抽动,可能是你多轴的PID P值设置过高。
Rate P值太高,主要现象是有5到10HZ的振动。
一般高性能多轴(有高推重比),需要较低的P值以避免振荡。
对于视频来说,就算P值没有明显引起振荡,也可能在视频中产生“抖动”的效果。
尝试降低P值30%左右。
配置快门
这里是关于:使用舵机自动触发相机快门的详细信息。佳能相机CHDK方法详细使用信息在这里 和 这里。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号