



















Pixhawk无人机教程-5.12 使用命令行界面配置
使用命令行界面配置
目录
- 使用命令行界面(CLI)配置ArduCopter
- 设置菜单
- “setup”(设置)菜单:命令:
- 测试菜单
- “test”(测试)菜单命令:
- 日志菜单
- “日志”菜单命令:
- 通过Mission Planner阅读和分析日志
- 通过CLI阅读和分析日志
使用命令行界面(CLI)配置ArduCopter
- 你不需要用Mission Planner去配置 ArduCopter(还有一些高级配置选项,在Mission Planner没有的)。
- 还可以通过串行终端,使用APM的嵌入命令行接口(CLI),可以在任意电脑或者操作系统中使用。
- 只能通过USB数据线,不能通过无线Xbee/3DR进行连接。
- 你还可能需要用CLI的部分功能,比如对您的RC接收机切换开关配置你喜欢的飞行模式。
请参阅下面的菜单描述说明。
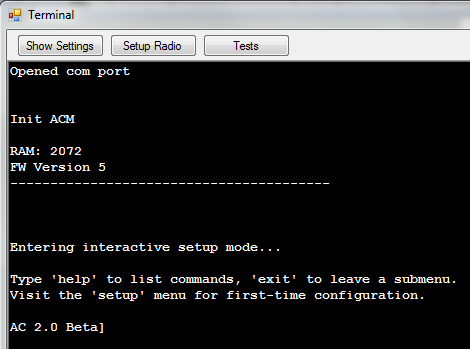
- 你可以通过在Mission Planner 终端屏幕上点击“Enter”三次来进入CLI中。
- 当你打开CLI,你会看到下图(最近一个版本的显示如下):
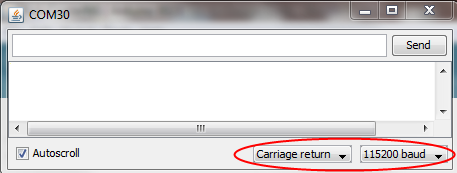
- 如果您不是使用Windows系统,您可以用Serial Monitor配置Arduino(记得要选择正确的波特率,启用CRs如下所示):
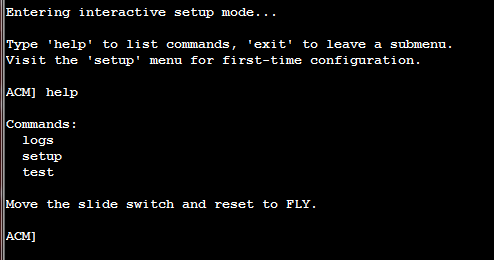
- 进入CLI,你可以在任何菜单输入“help”,然后您会得到一个完整的可用命令列表。
- 这里顶部有三个菜单: 设置、测试和日志。
- 当你在这部分,每个子菜单的命令还可以通过输入“帮助”看到。
设置菜单

CLI交互设置–你必须通过每一项设置,设置相应值以匹配你的硬件。
“setup”(设置)菜单:命令:
- erase: 首次安装ACM时,运行这个从eeprom擦去坏值–以防万一!
- reset: 执行复位工厂设置和初始化eeprom。
- radio: 记录所有的无线通道的限制值–很重要!
- motors: ESC和马达的互动设置。进入此模式,然后装上插件电池,在各个方向移动你的RC发射机的俯仰/滚转控制杆使支架在那个方向旋转(向上推动控制杆使四角的前转子旋转,向右推动会使右转子旋转)。
- 四轴以上的,这个操作会使一部分转子旋转,和操作杆推动方向一致的转子旋转最快。
- level: 设置加速度计的初始值–保持飞行器水平。
- modes: 给每个开关分配飞行模式(有五个模式可选)。 用你RC发射机的副翼/滚转操作杆在选项中滚动。
满右是在列表中前进,杆满左是在列表中后退。 按回车键保存设置并退出该模式。 - frame: 设置你的机架配置 (x, +, v (Octo))
- current: 启用一个AttoPilot电流传感器: (on, off, milliamp hours)
- sonar: 启用声呐传感器。 传感器连接到“pitot”这是一个模拟输入端口(on, off)。
- compass: 启用磁罗盘(on, off)
- declination: 设置你当地的偏差值–在网上查找准确值(十进制)
- show: 格式化输出的所有设置。
测试菜单
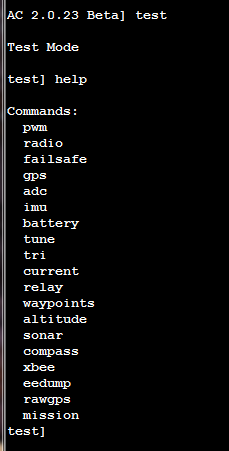
“test”(测试)菜单命令:
- pwm: 输出通道8的pwm值
- radio: 输出所有8个通道的控制量,单位为角度x100或者其他数值(详见radio.pde)
- failsafe: (目前未使用)
- stabilize: 调试测试其稳定性,并输出到终端。。(可以旋转螺旋桨–不建议飞行使用)
- gps: 输出GPS数据。 注意:通常需要在室外进行GPS锁定。 第一次上电可能要两分钟或更多时间来进行GPS锁定。
- adc: 输出原始adc值
- imu: 输出欧拉角
- battery: 输出电压在0 – 3模拟值
- tune: (目前未使用)
- current: 从一个AttoPilot电流传感器输出电压和电流。 电机会转,所以不要连接电机电线或者将旋翼卸下。
- relay: 触发继电器
- waypoints: 转存航点命令
- altitude: 机上显示气压传感器输出
- sonar: 显示声呐输出(如果连接且启用)
- compass: 输出磁罗盘角度,单位 度。(0=北)
- xbee: 输出一个用于测试范围的XBEE序列
- eedump: 输出eeprom原始的字节数
- rawgps: 输出原始,未解析的GPS数据
- mission: 给EEPROM写一个默认的任务(null,“wp”)。
选择“wp”选项将派出飞行器向北部飞15米并回来。
日志菜单

“日志”菜单命令:
- 数据记录
- 你可以用片上16Mb数据记录存储器来记录您的飞行和表演信息。
- 请注意,第一次使用日志之前你必须“擦除”使用CLI的日志(见下文)。
- 如果你做这一步,那么你可能会看到很多无效的日志。
- 通常地,在IMU壳上的滑动开关应该向板内拨去,这样就是数据记录/飞行模式。
- 但如果开关滑向板子边缘,它就会进入到CLI模式。
- 使用Arduino IDE串口检测器,你可以输入“日志”来管理和读取你的日志文件:
通过Mission Planner阅读和分析日志
- 最简单的下载和分析你的日志文件的方式就是通过Mission Planner来实现的,它将允许您通过图表来观察数据,为谷歌地球生成KML文件,另一方面它也可以灵活管理数据。
通过CLI阅读和分析日志
- 你也可以通过CLI来下载数据文件。 通过键盘 在CLI中输入 logs ,点击回车键。
这里是一些有用的命令:
“dump n“: 转储日志数 n。
“dump 0″: 转储和清除所有日志。
“erase”: 删除所有日志。
“enable name“: 启用日志记录的 名字。
用“all”启用全部。
“disable name“: 禁用日志记录的 名字。
用“all”禁用全部。
这里是可以被记录的字段名称,用默认状态显示:
| Log name | Default | Function |
| ATTITUDE_FAST | DISABLED | 日志以50Hz频率记录(使用更多的空间) |
| ATTITUDE_MED | DISABLED | 日志以10Hz频率记录(使用LOG_ATTITUDE_FAST比更少的空间) |
| GPS | ENABLED | 决录GPS信息到闪存,频率10Hz。 |
| PM | DISABLED | 记录IMU性能监控信息,每隔20秒。 |
| CTUN | ENABLED | 记录控制回路调整信息,频率10 Hz。 这些信息对于调整伺服控制回路的增益值非常有用。 |
| NTUN | ENABLED | 记录导航调谐信息,频率10 Hz。 这些信息对于调整导航控制回路增益值时很有用。 |
| MODE | DISABLED | 记录飞行模式发生的更改。 |
| RAW | DISABLED | 记录加速度计和陀螺仪的原始数据,频率50hz(使用更多空间) |
| CMD | ENABLED | 在进行中记录新命令 |
| CURRENT | DISABLED | 如果电流传感器连接并启用,则记录其信息 |
| MOTORS | DISABLED | 记录电机命令 |
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号