



















Pixhawk无人机教程-5.8 油门故障保护
油门故障保护
目录
- 油门故障保护
- 何时会触发以及会发生什么
- 接收机与飞行控制器设定
- 测试以确保正确操作油门故障保护
- 油门故障保护是如何工作的。
- 使用PPM Sum接收机的故障保护操作
- 使用Spektrum卫星接收机的故障保护操作
故障保护
从版本APM 3.0开始,飞行器有四种故障保护:
1.油门、电池、GPS和地面控制站。
2.默认只开启GPS的故障保护。
3.连接到电池GPS和地面控制站故障保护页面
何时会触发以及会发生什么
如果正确设置和启用了油门故障保护,启动条件是:
你的飞行器飞出了遥控的范围。
你关闭了遥控发射机。
你的接收机由于某些原因掉电了。
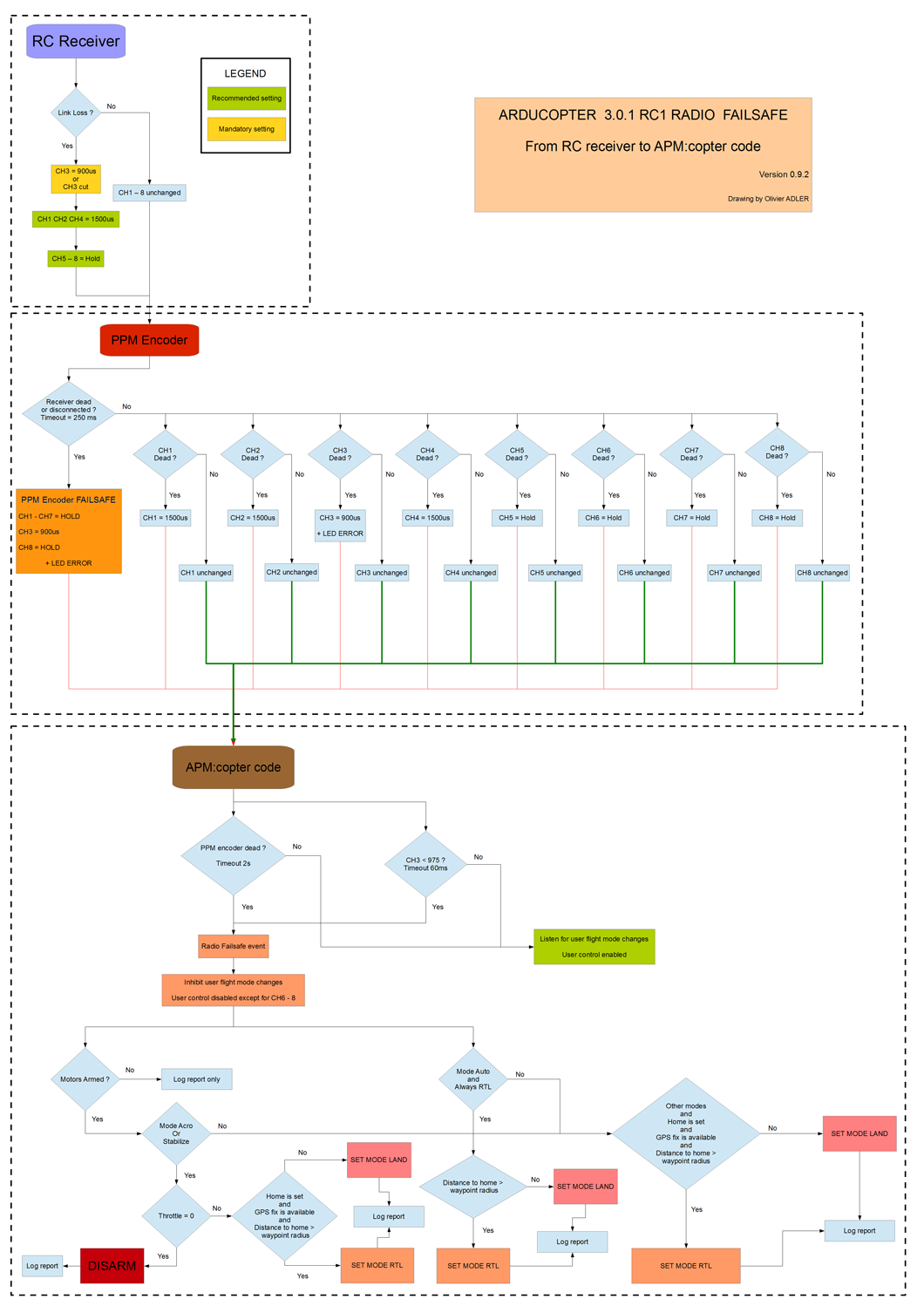
接收机的通道3信号线至APM的输入断开。
(注: 此方法取决于你的ppm编码器版本。 多数用户用的就是最新的PPM编码器固件,但如果你用的是比较老的板子,这里是APM2.X的PPM编码器固件更新说明。)
APM的PPM编码器发送更新失败,时间为2秒时(罕见)。
PPM编码器是在APM主板上的一个小芯片,唯一功能是从接收器读取无线信号并将它们发送至APM的主处理器。

当油门故障保护触发,会出现以下情况之一:
1.电机上锁——如果在自稳模式或者特技模式,且油门为0
2.返航——如果GPS已锁定,离“家”的位置至少2米
3.降落——如果GPS未锁定或离“家”2米内触发故障保护。
4.继续执行任务–如果在自动模式下,且故障保护选项为“Enabled_continue_in_auto_mode”。
5.如果故障保护清除(油门在975以上)飞行器将保持在当前飞行模式。 它不会自动地返回故障保护触发之前的飞行模式。
这意味着,如果以自稳模式飞行,故障安全模式被触发,导致飞行模式更改为RTL或,如果您重新控制飞行器,你需要飞行模式开关切换到另一位置,然后再切换回自稳模式。
接收机与飞行控制器设定
接收机设置:
每个品牌的发射器/接收器设置故障保护的方法略有不同,除了非常便宜的品牌,其他都可以在发射器和接收器(tx/rx)失去联系时,某些或所有通道变为设定的级别。
请参阅遥控器用户手册,详细了解如何启用故障保护。
Below are links for specific transmitters/recievers:
Futaba T7C 发射机与R617FS或TFR4-B接收机:
FlySky 9通道发射机与FrSky D4R-II接收机:
当发射器关闭时,你必须设置油门通道(通道3)低于它的正常范围(理想情况下低于975),理想情况下,所有其他通道应保持在其最后一次的位置或移动到中间位置
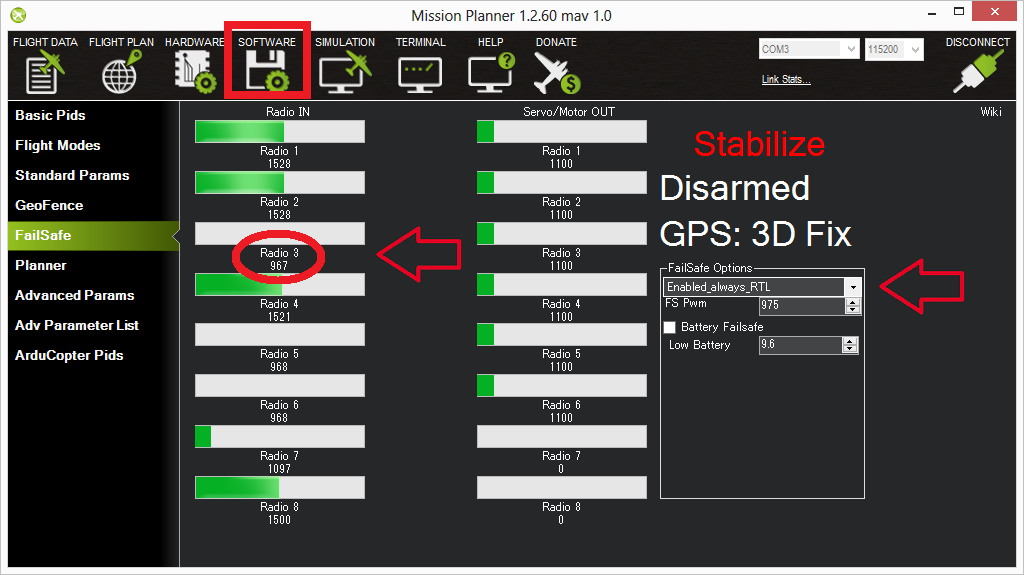
当发射/接收和APM断开联系,查看油门通道变为多少,打开Mission Planner,找到Software(软件) > Failsafe(故障保护)页面。
飞行控制器设定
断开锂电池连接,连接APM至Mission Planner,然后选择“软件” > “故障保护”。
“故障保护选项”为“Enabled_always_RTL”或“Enabled_continue_in_auto_mode”让你想自动执行任务时,可以超出发送/接收范围(一般来说不推荐)。
调整故障保护PWM范围为:
当发射机关闭时,至少比通道3的pwm值高10。
当发射机打开时,至少比通道3的pwm值低10。
大于910
测试以确保正确操作油门故障保护
以下的测试演示可用于检测故障保护,APM可以通过USB线或者数传连接至mission planner。
测试过程不用连接锂电池,但是如果连接电池,请把桨移除。
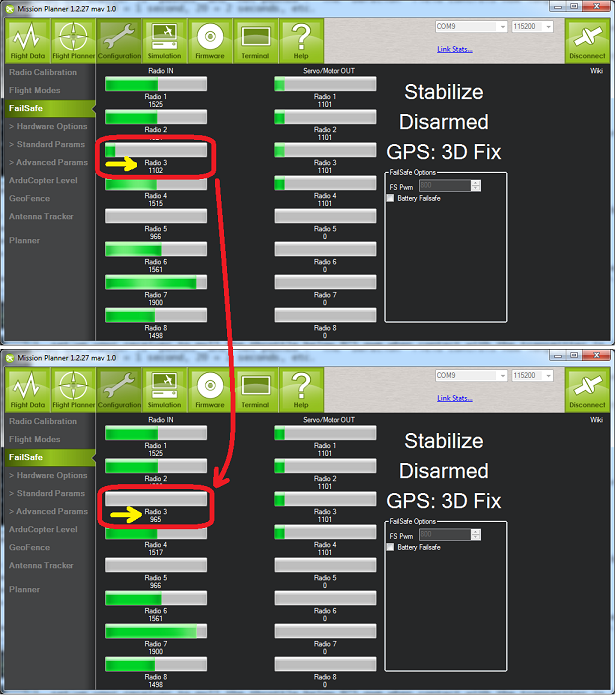
测试#1:确保油门通道丢失无线连接时下降
确保遥控发射器打开,油门连接上并位于最低,飞行模式设置为“自稳”
油门(通道3)pwm值设定为下面第一个图所示值。
它的值可能会高一点或低一些,但是至少比故障保护区域的PWM高10。
关闭发射机,油门PWM值就应下降至少比故障保护PWM值低10(在下面的第二幅图中)以下。
测试#2:确保在自稳或特技模式且油门为0,电机上锁。
切换到自稳模式,电机解锁同时油门为0。
关闭发射机。
电机应立刻上锁(红色LED指示灯开始闪烁,DISARMED将显示在Mission Planner飞行数据显示屏上)。
测试#3:油门高于0,确保飞行模式切换为“返航”或“降落”。
切换到自稳模式,解锁电机,推高油门至中间位置。
关闭发射机。
GPS锁定了,飞行模式切换到RTL,或着如果没有GPS锁定,切换至“模式”(飞行模式和GPS锁定状态在Mission Planner的飞行数据窗口显示)。
测试#4:油门故障保护发生后,重新获得控制。
接着测试#3,重新打开遥控器。
飞行模式仍然是“返航”或“降落”,电机已解锁,切换飞行模式开关至其位置,然后再切换为自稳模式。
确保故障保护页面的飞行模式正确更新了。
测试#5(可选):拔除接收机电源
切换到自稳模式,解锁电机,保持油门0以上。
小心地拔下将接收器连接到APM的电源电缆
飞行模式应如测试#3描述,切换到“返航”或”降落”模式。
警告:重新连接接收机钱,请先将APM的电源断电。
警告frsky接收机用户和其他修改通道5的故障安全事件的接收机的用户
一些FRSky tx/rx系统的接收机,故障保护发生期间,设置时只能修改所有通道,包括飞行模式通道(通道5)。
设置接收机通道5的故障保护的值是非常重要的。
这重要,因为在接收机拉低油门和APM初始化RTL或LAND期间,时间很短(3/50ths)。
在这段时间,如果接收机也切换飞行模式通道为自稳或特技模式,APM可能瞬间切换为自稳模式,然后由于飞行器在自稳模式,且油门为0,飞行器就会上锁(即测试#2)。
请注意: 所有故障保护参数,也可以在“高级参数列表“中查看或设置。
油门故障保护是如何工作的。
遥控器输出PWM信号,被接收机捕获并将其转交给APM。
遥控器上的每个通道有一个PWM范围,通常介于1100-1900,中间位置是1500。
当你在Mission Planner上启动遥控校准,所有值都将设置为1500。
通过移动遥控杆,旋钮和切换开关,设置每个通道的PWM范围。
APM油门通道,如果发现低于THR_FS_VALUE(默认值为975)就会进入故障保护模式。
遥控发射机的每个通道值,通常都有默认的范围,从-100%到100%,但大部发射器允许你分别扩展为-150%和150%。
在默认设置中,将油门推在-100%位置,转换后的值接近1100,将其推到-150%位置,转换后的值接近900。
我们想达到的目的,是要让您知道接收器的油门可以低至-150%,但要保持APM控制范围在-100%和100%之间。
这意味着飞行时,油门值范围在1100-1900之间。
但是,如果不在范围内,接收器设置正确,油门值将会降至已知最低值~900。
这个值下降在THR_FS_VALUE以下,将会触发APM切换到故障保护模式。
额外 范围 一般 范围 额外 范围
|-----------------|-----------------|-----------------|
-150% -100% 100% 150%
|_________________|
|
故障保护
使用PPM Sum接收机的故障保护操作
如果在pass-through模式(APM输入引脚2&3短接)APM连接PPM Sum接收机,APM的PPM译码器就可以工作了。
没有独立的通道可以分析,也没有通道可以修改。
如果将接收机已断开连接或PPM信号被切断,超时250ms后,PPM编码器看门狗中断将会执行8通道PPM-PWM发生器,故障保护值如下:
CH1, CH2, CH4, CH6, CH7, CH8 = 1500
CH3 = 900
CH5 = 1555 (飞行模式4)
如果从到的PPM接收机检测到一个输入电平变化了,这里故障保护输出终止,恢复正常的PPM传输。
另外有一条规定,APM2.5主板在使用PPM-Sum接收机时,会直接绕过PPM编码器。
PPM信号连接至APM2.5主板的输入CH5(不是CH1)。
另外, APM2.5板有一个焊盘需要修改,需要焊接。
使用Spektrum卫星接收机的故障保护操作
当在Pixhawk上使用Spektrum卫星接收机时,故障保护会在卫星接收机没有数据两秒后触发,当发射机关闭后不会立即触发。 这种现象是由于卫星接收机直接连接到Pixhawk,没有连接主接收机导致的。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号