



















Pixhawk无人机教程-5.4 通道7和8的选项
通道7和8的选项
默认情况下,通道7的设置为把当前位置保存为航点(参见下方“保存航点”),可以在Mission Planner>ArduCopter Pids 页面进行设置。
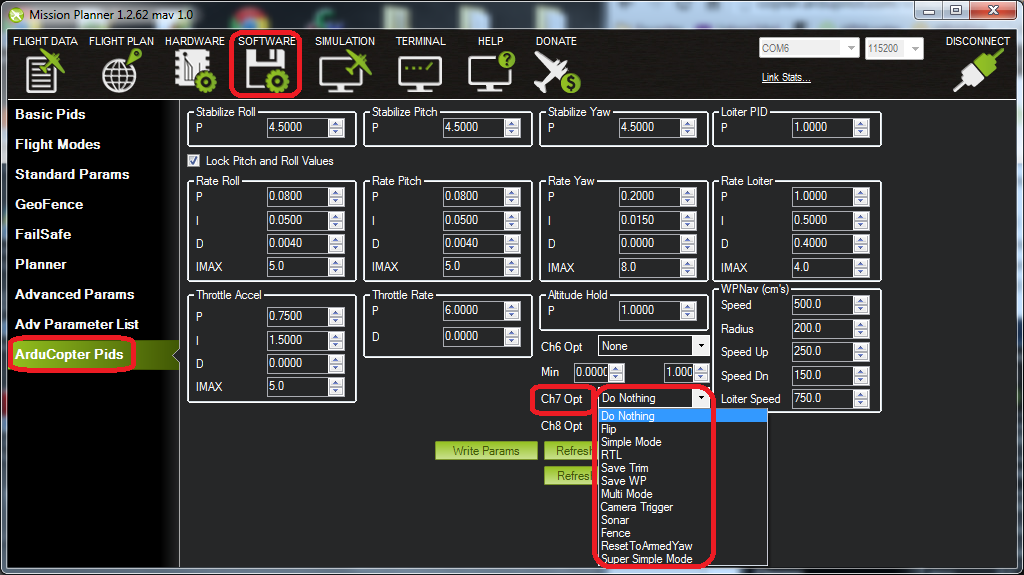
| 选项 | 描述 |
| Flip(翻滚) |
模型将在roll轴翻滚。 模型将上升1秒然后迅速翻滚。 模型不会再次翻滚,直到再次激活该功能需要该通道开关先打到低值再打到高值。 在第一次翻滚时你应保证10m以上的飞行高度! |
| Simple Mode(简单模式) |
飞机左、右、前、后移动,不用管飞机的朝向,和起飞的时的方向相同。 |
| RTL(返航) |
回到起飞点。 模型将爬升到一个安全高度(通过RTL_ALT parameter参数定义),然后回家,在家的上空暂停5秒(通过RTL_LOIT_TIME参数设置)然后下降到2米高位置或者降落(通过RTL_ALT_FINAL参数设置)。 |
| Save Trim(保存微调) |
使用当前的roll和pitch值调整飞行器的水平位置。 详见这里。 |
| Save WP(保存航点) |
保存当前位置(包括高度)为任务航点。 如果正在执行自动模式航点将不会保存,并且飞行器将返航。 |
| Multi Mode(多模式) |
当通道7或8开关打到在开启位置,通道6旋钮开关将控制以下3个功能:
通道6 <1200 : Flip(翻滚) 通道6 1201~1799: RTL(返航) 通道6 > 1800: Save Waypoint(保存航点) |
| Camera Trigger(相机触发) |
相机快门将会激活。 更多信息参见这里。 |
| Sonar(声呐) |
声纳在开关低位关闭,高位打开。 |
| Fence(围栏) |
围栏在开关低位关闭,高位打开。 |
| ResetToArmedYaw(重置为解锁航向) | 飞行器将转向至第一次解锁时(例如起飞)的航向。 当你失去航向需要使飞行器回家时,这是简单模式的一种替代选择。 |
| Super Simple Mode(超简单模式) |
和简单模式类似,除了控制的相对位置为家的位置。 推pitch飞行器远离家,拉pitch飞行器往家飞。 左右移动roll摇杆,飞行器将会绕家的位置绕圈而不论飞行器目前的朝向如何。 |
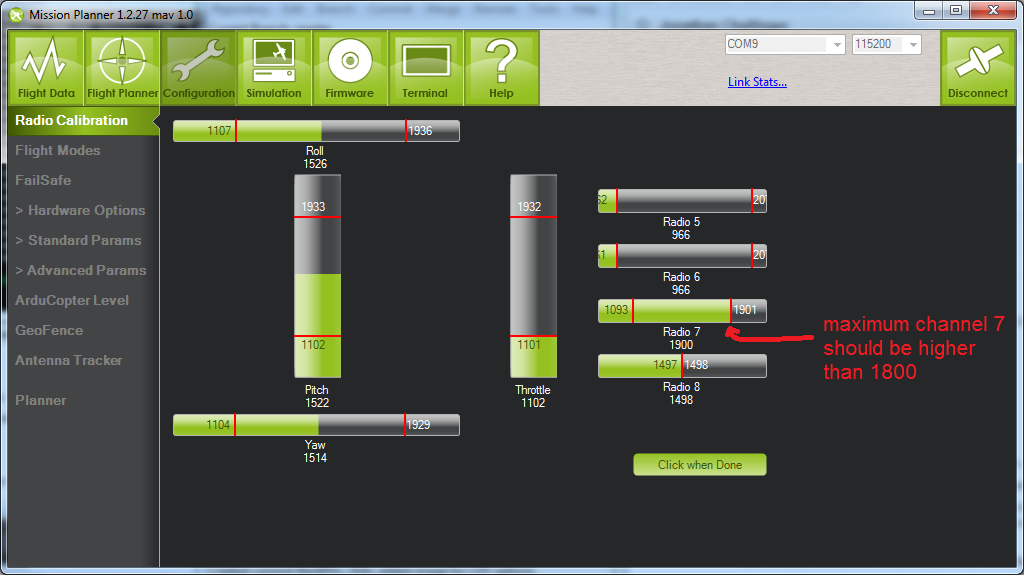
检查通道7和通道8的PWM值是否达到1800
通道7、8的PWM值必须达到1800以上否则不能激活该辅助功能。 你可以通过Mission Planner的遥控器设置界面检查该值是否能达到。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号