



















Pixhawk无人机教程-5.2 高级罗盘设定
高级罗盘设定
- 本页介绍如何安装和校准罗盘。
- 大多数用户只需要选择方向和执行现场校准,同时也给出了较少使用的CompassMot和手动磁偏角。
- 这些配置可以从Mission Planner的初始设置>>强制硬件>>罗盘界面找到
- 其他地面站很可能有类似的功能。
- 准确配置罗盘非常重要,因为它是航向信息的主要来源。
- 在自动驾驶模式,如果没有准确的航向,飞行器移动的方向就不对(如留待、定点、返航、自动等)。
- 这可能会导致打转(类似“抽水马桶旋涡状”)或飞走。
目录
- 高级罗盘设定
- 设置方向
- 现场校准补偿
- 罗盘干扰补偿 — 电源线、电调、电机干扰的补偿
- 手动磁偏角
- 在飞行中调整偏差
设置方向
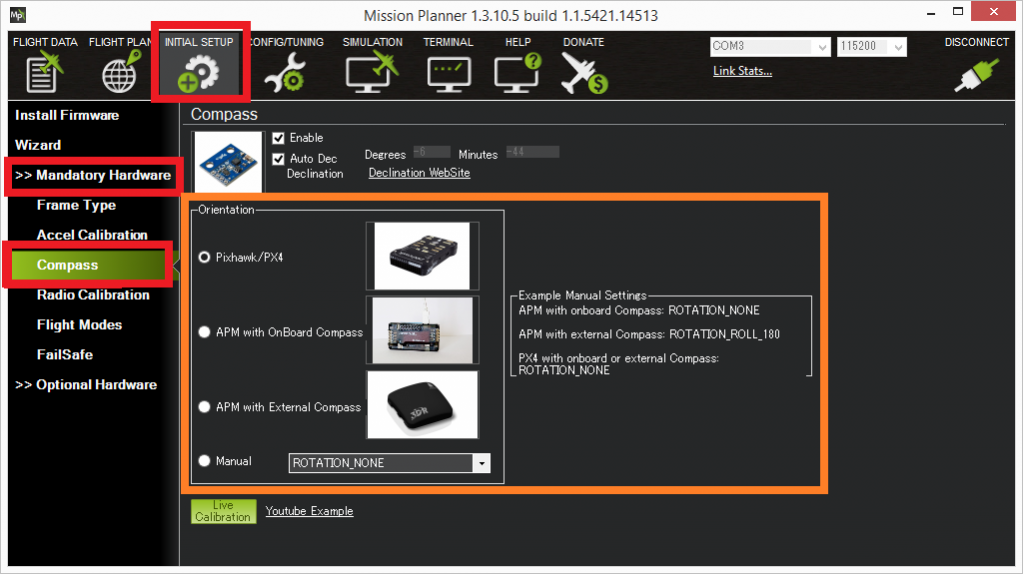
从Mission Planner初始设置>>强制硬件>>罗盘界面的方向设置区域选择您正在使用的飞行控制器(如“pixhawk”或“APM”),这将设置罗盘方向为该板的默认值:
- Pixhawk/PX4:如果你正在使用一个pixhawk或PX4板请选择这项。
- 内置和外置的罗盘会被检测到。
- 如果外置罗盘被检测到,会假设您安装3DR的(或兼容的)GPS/罗盘模块,所以白色箭头应指向机架前方。
- 若未使用3DR GPS/罗盘模块您或许需要手动设置方向(见下文)。
板载罗盘APM:
- 如果你正在使用一个有板载罗盘的APM(即apm2.5或更早的版本)请选择这项。
外置罗盘APM:
- 如果你正在使用一个没有内置罗盘的APM(即APM2.6),并安装3DR GPS/罗盘模块请选择这项,白色箭头应指向机架前方。
- 如果你没有使用3DR GPS/罗盘模块您可能需要手动设置方向(见下文)。
手动:
- 如果使用非标准外置罗盘或者3DR GPS/罗盘安装方向不标准。
- 或任何方向以45度为单位偏移,甚至倒置。
- 使用手持罗盘按以下步骤来确定正确的设置。
- 放置飞行器在一个平面,然后对比已知方向和从下拉菜单第一个到第八个选项(即“ROTATION_NONE”到“ROTATION_YAW_315″)选择一个符合实际航向(在HUD显示)的选项。
- 现在把你的机架向左或者向右转动,如果HUD航向跟随你的转动,就完成了。
- 如果航向变成了与飞行器相反的方向,设置手动旋转为“roll_180”。
- 如rotation_yaw_45改为rotation_roll_180_yaw_45。
现场校准补偿
- 通过追赶白色小点,计算补偿值来补偿“硬铁”失真。
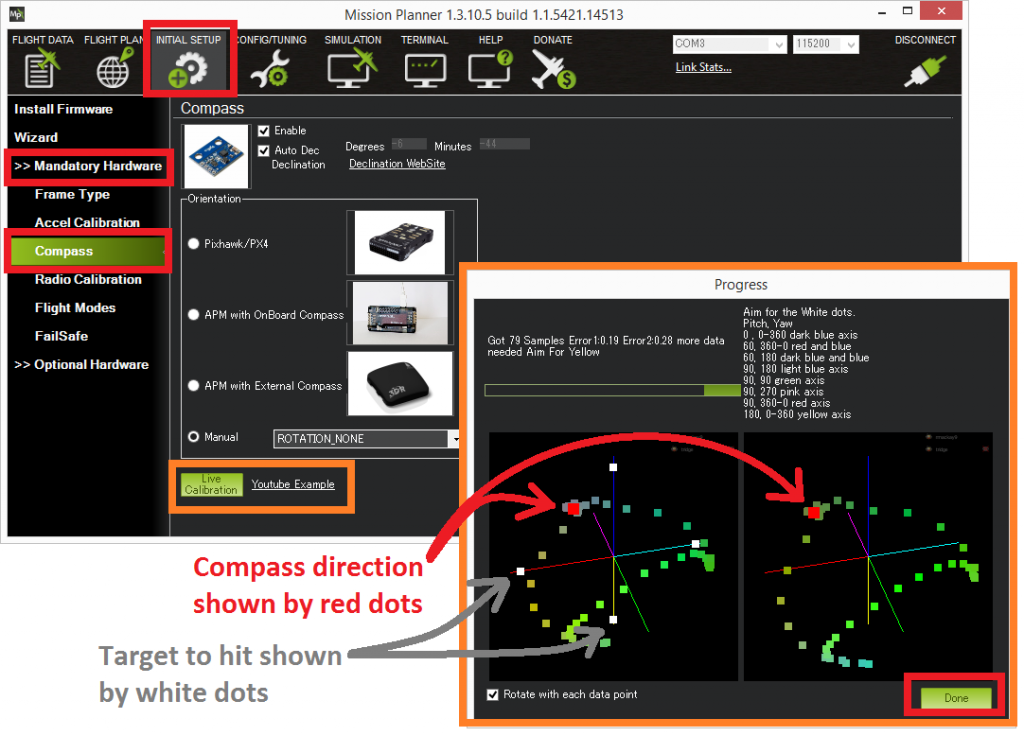
- 按“现场校准”按钮开始校准。
- 将出现一个窗口显示一个球体(或两个,如果你的飞行控制器有两个罗盘)红点表示罗盘当前指向。
- 当你旋转飞行器,你会发现红点移动并且(可能容易混淆)该球体本身也进行旋转。
- 罗盘经过的地方留下一条彩色路径。
- 球体上的六个目标显示为白点。
- 旋转飞行器使红点到达每个白点使它消失。
- 当所有白点都消失了你可以按Done以完成校准和保存补偿值。
- 最终补偿值将会显示出来(每个罗盘3个数值),如果这些数字都低于250,那你可认为它们是很好的。
- 如果你错过他们可以在高级参数列表查看COMPASS_OFS_X,Y和Z的数值。
- 如果数值是非常高的,可能表明罗盘附近存在某些金属。
策略之一,缓慢地旋转飞行器,可捕获所有的白点,使得每个面(前,后,左,右,上和下)向下指朝地面几秒钟(注:下面图片只有推荐的6个面的4个)

下面的视频是早期版本的校准例程,但仍能获得好的补偿值。
一些开发团队成员建议使用数传在户外远离金属物体执行校准(关键是你的线不会乱成一团)尽管没有测试证实这是必要的。
罗盘干扰补偿 — 电源线、电调、电机干扰的补偿
我们建议@如果你的飞行器只有一个内置罗盘而且被电机、电源线等明显干扰,你有一个电流计时使用CompassMot的效果很好,因为磁场的干扰和电流变化有线性关系, 技术上,利用油门来建立CompassMot是可行的,但是不建议这样做。
请按照以下说明:
1.启用电流计(又称电源模块)
2.拆掉桨,把它们反过来,旋转一个位置。这种配置下推油门,会使飞行器往地下推进。
3.固定飞行器(可用胶带)使其不会移动。
4.打开你的发射机,并保持油门为零
5.给飞行器接上电池
6.用USB线将你的飞行控制器连接到你的电脑
如果使用AC3.2:
打开初始设置>>可选硬件>>罗盘/电机校准界面
按下开始按钮

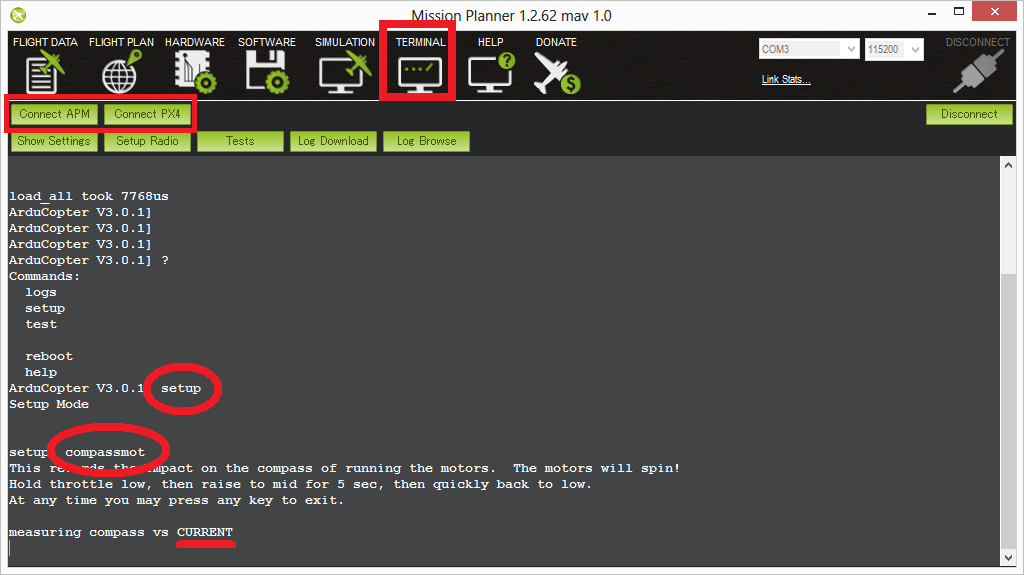
如果使用AC3.1.5:
打开终端界面,点击“Connect APM” 或 “Connect PX4”
在命令行输入setup,然后输入 compassmot。
如果电源模块/电流计被启用,你应该看到“measuring compass vs CURRENT”
你要听电调的解锁BB声
在5-10秒时间缓慢推油门至50%-75%(桨会转)
迅速降低油门至0
按下Finish按钮(AC3.2)或者按下回车键(AC3.1.5)来完成校准
检查屏幕显示的干扰百分比。如果低于30%,那么你的罗盘干扰是可接受的,你将在悬停、返航、自动模式看到较好的表现。如果在31% ~ 60%,处在灰色地带,可能是正常的(有人很好,有人很差)。如果高于60%,你需要尝试移动APM/PX远离干扰源,或购买外置罗盘、带罗盘的GPS.
这是基于AC3.1.5整个校准过程的视频:
手动磁偏角
默认情况下,当飞行器首次实现了GPS锁定,磁偏角被看作一个压缩表格。
这种方法可精确到1度(这应该是足够了的),但如果你希望使用未经压缩偏角:
打开磁偏角网站。
将会通过IP地址自动定位你的位置,你也可以输入你的位置。

不要选择Auto Dec选择框,在mission planner偏差区域手动输入偏差值(上图中红色高亮部分)。在此示例中,我们输入“14”Degrees和“13”Minutes。
当光标离开这个区域(如按Tab键),该值将被转换为十进制弧度并保存到参数COMPASS_DEC。

在飞行中调整偏差
虽然我们认为这不是必要的,你可以使用6通道的微调旋钮在飞行中调整磁偏角,步骤如下:
1.连接APM/PX4到 Mission Planner
2.到软件 > ArduCopter Pids界面
3.设置6通道为 “Declination”,最小值“0.0” ,最大值 “3.0”。这将有可调角度-30到+30度。同理,设置最大值为 “2.0” ,可调角度为 -20 到 +20 。
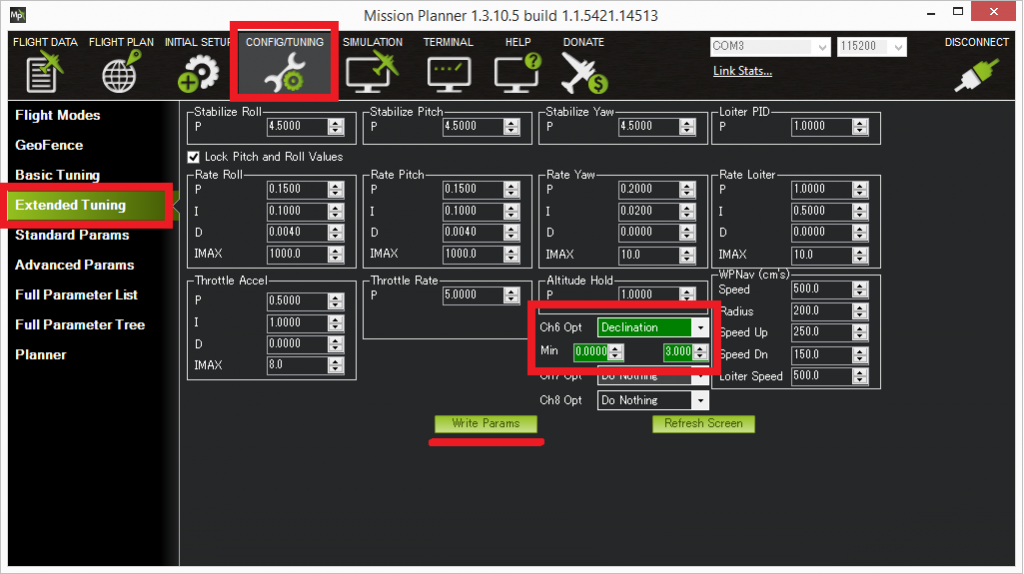
调节通道6旋钮至最大值时,检查磁偏角调整是否正确。转到配置/调试 >> Standard Params界面,点击“Refresh Params”按钮,确定COMPASS_DEC是0.523(这是30度转为弧度)

以留待模式飞行你的飞机至少两个方向,且确保快速向前飞时没有任何转圈(抽风现象)。
如果出现了不应该出现的转向,那么很可能是你的罗盘受到干扰,需要外置罗盘或带罗盘的GPS。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号