



















Pixhawk无人机教程-4.1.13 留待模式 Loiter Mode
留待模式 Loiter Mode
留待模式,保持飞行器的位置、方向、高度不变。本页面描述了,使用留待模式时需要什么,提供飞行和调试的建议。
概览
留待模式打开后,飞行器会自动保持当前位置、方向、高度不变。GPS定位精确、 罗盘干扰小 、 振动小 ,悬停效果就比较好。
控制
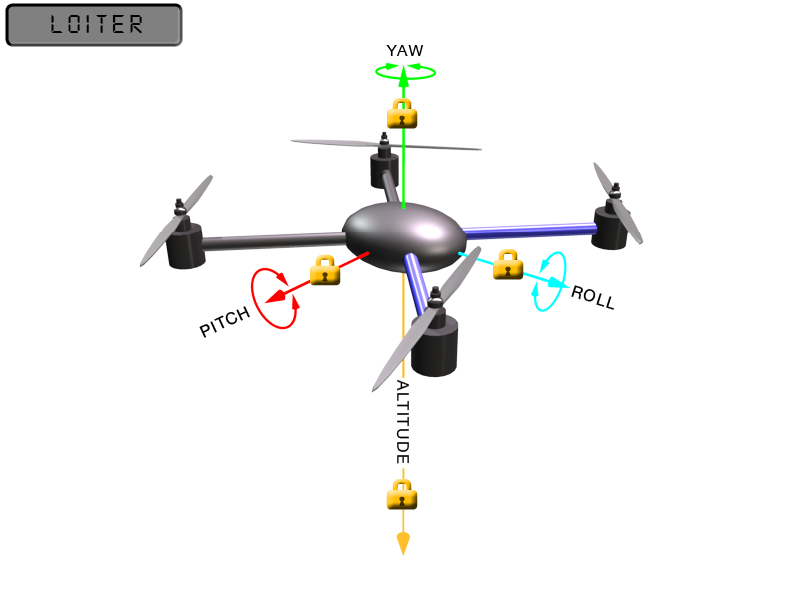
- 操控者使用控制杆,控制飞行器水平位置和垂直高度。
- 水平位置可以用Roll和Pitch控制杆调节,水平最大速度默认为5m/s(参看下方:如何调试)。
- 当飞手放开摇杆,飞行器会缓慢降速,直到停止。
- 同 定高模式 一样,通过油门杆控制高度。
- 通过Yaw控制杆控制方向。
在AC3.1(或更高版本),当GPS 3D锁定了和HDOP降到2.0或更低,就可以在悬停模式解锁。当3D 锁定了,APM2板上的兰灯停闪。在Pixhawk上,LED变绿色(更多信息请点击这里)在mission planner双击快速查看窗口(Quick screen),选择“gpshdop”,HDOP值会在右边检查框清楚的显示出来。

调试
- 留待模式结合了定高模式的高度控制。详细信息 此页面讲述定高。
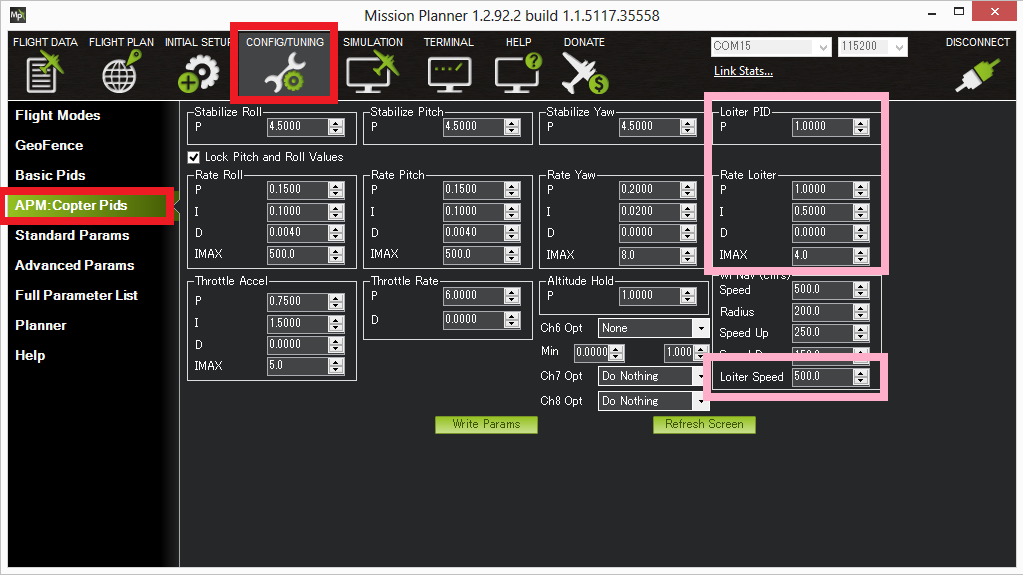
- 留待模式下,在配置/调试->APM:Copter Pids界面,调节悬停速度参数(亦称:WPNAV_LOIT_SPEED)可修改飞行器最大水平速度。单位是cm/s,例如:500代表5m/s。
- 留待模式,最大水平加速度始终是悬停速度的1/2。
- 留待PID的P值(屏幕右上角)作用于纠正水平位置速度的偏差(目标位置和实际位置的误差)。通常默认即可。
- 留待PID比例系数,作用于把预想的速度转换成完成目标所需加速度。
- 先将期望的加速度转化为一个倾斜角,然后再加速,使用的是与 自稳模式相同的角度控制器。通常默认即可。
从闪存日志中验证留待的性能
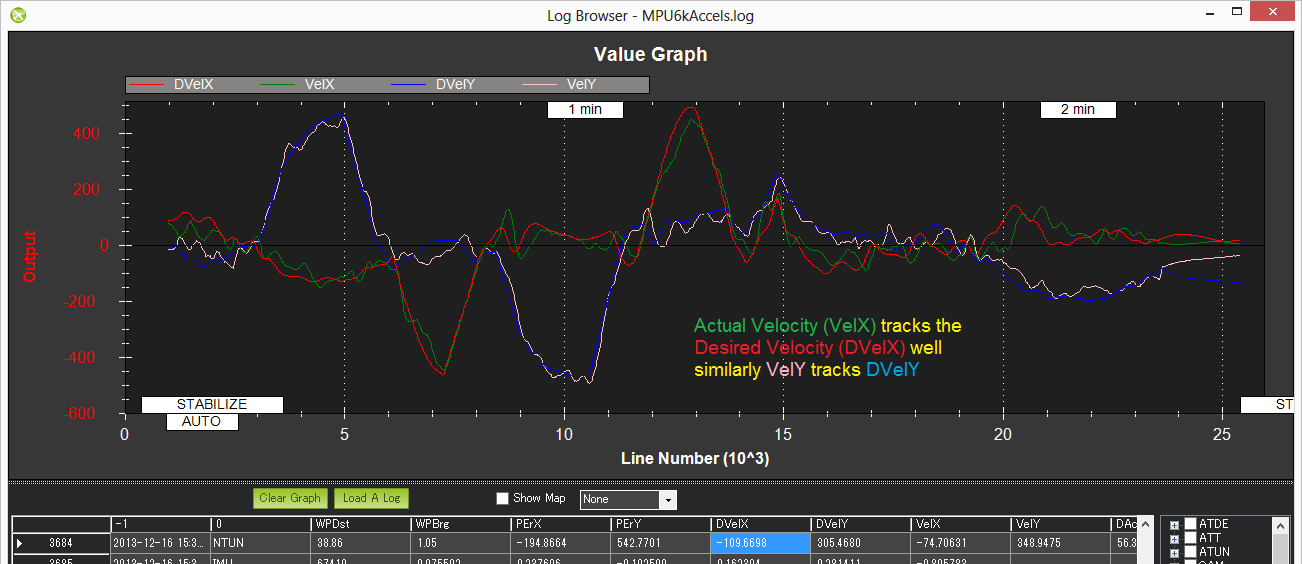
- 查看留待水平的性能,最好是从飞行器下载 闪存日志 ,用Mission planner打开,查看NTUN曲线图信息:DesVelX曲线与VelX曲线、DesVelY曲线与VelY曲线。
- 在飞行器性能良好时,实际速度和期望速度曲线对比,如下图所示。
- X = 纬度(正 = 北移,负 = 南移),Y=经度(正 = 东,负 = 西)。
检查高度保持性能和 定高 模式是一样的。
常见问题
如上所述,留待模式是定高模式的高度控制的结合。有关定高,请访问 定高Wiki页面。
模型转圈 (又称为“toiletbowls")。这通常是由于罗盘问题。最有可能的是飞行控制器下的电源电缆 电磁干扰 导致的。 运行compassmot命令测试罗盘 或购买一个 GPS+罗盘模块 通常可以解决问题。其他的可能发生:在实时 校准过程 罗盘偏移量出问题,或罗盘方向不正确。
模型一进入留待模式,就飞错方向。原因和问题1相同,但罗盘误差大于90度。请尝试以上的建议来解决此问题。
模型正常悬停时,突然乱飞。这通常是由于 GPS短时脉冲干扰。不可能100%保证这种情况不发生,也就是说应该始终准备采取的手动控制。其次在飞行前,保证GPS HDOP值适当很重要,另外减小参数GPSGLITCH_RADIUS或GPSGLITCH_ACCEL(请参阅 GPSGlitch Wiki页面 了解详细信息),能更频繁对短时脉冲波形干扰进行检测。
OF_LOITER模式
OF_LOITER模式是留待模式中比较特殊的模式,该模式将使用光流设备保证位置的控制。本模式尚未应用,但不影响正常工作。APM:COPTER更新之前,即确定已测试并正常工作前,请勿选择OF_LOITER模式。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号