



















Pixhawk无人机教程-4.1.6 引导模式 Guided Mode
引导模式 Guided Mode
引导模式是APM:Copter的一个功能,基于遥测无线电模块和地面接收站应用程序,引导飞行器飞到目标位置。本页面提供引导模式的有关信息。
目录
- 引导模式
- 概览
- 你需要做的:
- 说明
概览
和传统飞行模式不一样,模式切换开关上没有对应的–引导模式。想用引导模式,你需要有一个数传(如3DR数传)和地面站应用程序(如Mission Planner)。在Mission Planner的Flight Data地图界面,想往哪飞,就点哪里。到达目的地后,飞行器会悬停在目的地,等待下一个目标。跟着我模式也是基于引导模式,飞行器就会跟随你走。
你需要做的:
使用引导模式,你需要电脑或平板作为地面站、地面站应用程序(如 Mission Planner )、一套数传设备(如:3DR数传套件 915MHz(美国) 或 433MHz(欧洲),从而你的计算机和飞行器,在飞行期间进行通信)。
说明
- 初始化飞行器后,然后在飞行器和电脑间建立MAVLink无线连接。
- 在软件上,查找数传模块信息,确保数传正常工作和GPS已经定位了。
- 在自稳模式起飞,上升到合理高度后,再切换到悬停模式。
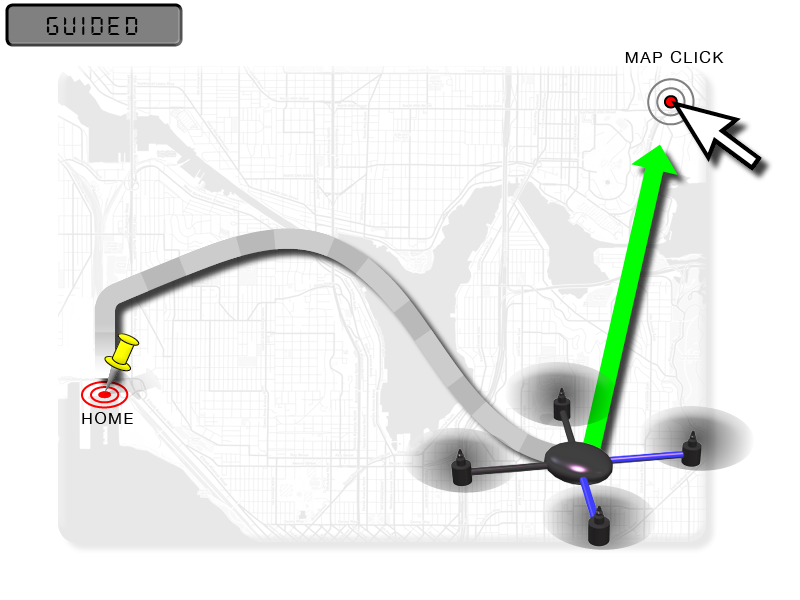
- 在Misson Planner飞行数据地图显示界面,单击鼠标右键,然后选择“飞到此处”。
- 在跳出的窗口输入高度。输入高于“家”的高度,单位为米。

地图上应该显示“Guided”目的地,橙色线(航行方向)应指向目标位置。

模型飞到目标位置,然后原地不动,直到你输入另一个位置或切换到其他模式。
注意:我们没有必要去设置飞行模式为“引导”
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号