



















Pixhawk无人机教程-4.1.4 绕圈模式 Circle Mode
绕圈模式 Circle Mode
当模型启动绕圈模式时,它会开始以10m为半径绕圈飞行,机头朝向中点。
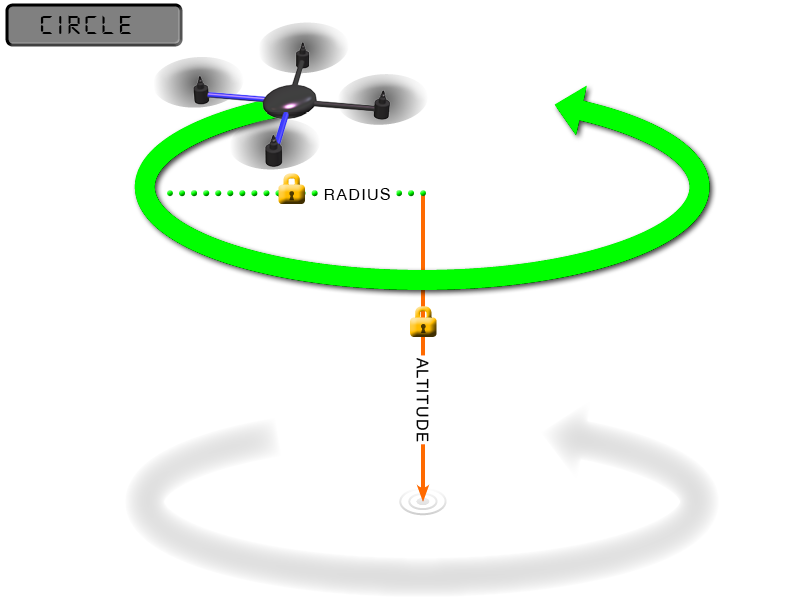
CIRCLE_RADIUS参数
- 绕圈的半径可通过修改CIRCLE_RADIUS参数进行控制。
- 以米为单位。
- 将CIRCLE_RADIUS设为零,飞行器就会简单的呆在原位并缓慢旋转(可用于全景摄像)。
CIRCLE_RATE参数
- 模型的速度(以度/秒为单位)可通过改变CIRCLE_RATE参数修改。
- 正值意味着顺时针旋转,负值意味着逆时针旋转。
- 如果向圆心的加速度超过了WPNAV_ACCEL参数的最大限制(以cm/s/s为单位),模型可能达不到期望的速度。
roll,pitch和yaw
- 飞手不能控制roll和pitch,但可以通过油门摇杆改变高度,就像在定高和悬停模式一样。
- 飞手可以控制飞行器的yaw,自动驾驶仪不会重新获得yaw的控制权,直到绕圈模式再次启动。
- 在任务中,使用任务命令LOITER_TURNS调用绕圈模式。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号