



















Pixhawk无人机教程-2.5.1 APM版本3.0:多轴固件
APM版本3.0:多轴固件
重要! 点此链接到讨论区,你可以看到所有的论坛留言。
ArduCopter 3.0已经为广泛使用做好了准备。为了让过渡更为简单, 在我们把3.0版本作为地面站默认下载的估计之前,我们鼓励大家从2.9.1b版升级到3.0版。新版本可以在地面站的测试固件中找到。
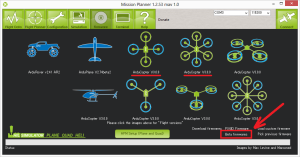
下载固件
警告 #1: 在地里围栏中有已知的一个BUG,在丢失GPS信号时 ,飞机可能进入极端的飞行角度。这一点已经在AC3.0.1-rc1.
警告 #2: 此发布版本尚未在传统直升机上测试。
警告 #3: 在悬停模式中,GPS的小故障可能导致飞机位置突然的剧烈变化。你可能需要降低WPNAV_ACCEL到100并调节Loiter Speed到0.2来减缓这种剧烈运动。
2.91b后的更新包括:
悬停和自动模式的的导航更加精准 (Randy,Leonard,JonathanC)
在所有情况下,3D导航控制器可以控制飞机在航点间直线飞行 (Leonard,Randy)
WPNAV_SPEED, WPNAV_SPEED_UP, WPNAV_SPEED_DN, WPNAV_ACCEL参数提供了飞行任务中的速度和加速度配置
“compassmot” 用于补偿来自于pdb,电机,电调和电池对磁罗盘的干扰。(设置视频在这里)
安全性更新:
- 更简单的地理围栏
- 解锁前检查,用于全部所有的校准在解锁前已完成(可以通过设置 ARMING_CHECK关闭)
- GPS失控保护–如果GPS丢失5s切换到降落模式
- 稳定性补丁,用于防止特殊情况下飞机快速的爬升
- 盘旋模式增加了“panorama”功能, 当CIRCLE_RADIUS 设置为0时(Randy,Leonard)
- 增加了SONAR_GAIN参数确保了更好的协调了超声传感器的轨迹
- CH8 辅助开关(与 CH7相同)
- 在PX4上同样适用(一些次要的功能尚未准备好) (Tridge,PatH)
如何更新:
确保你的地面站在1.2.57或者更新的版本,请不要使用1.2.56
http://ardupilot.com/downloads/?did=63点击地面站固件页面,点击右下角测试固件的链接。软件版本会更新为 “ArduCopter-3.0.0″ (or “-rc6″), 然后根据个人情况点击机架设置。.
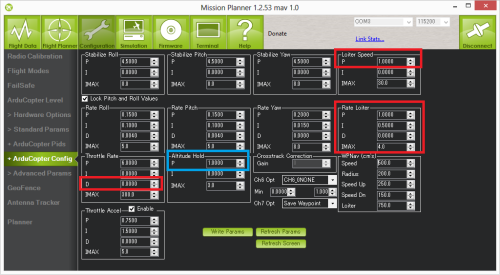
- 减少了可更改的悬停和定高模式的PID值,可以在图片下方看到为3DR改进后的PID值。
注意:导航参数和悬停结合在了一起,所以你不必担心你找不到它们。
- 如果你在2013年3月前购买的APM,请把你的PPM编码器更新到最新的固件。
http://copter.ardupilot.com/wiki/common-ppm-encoder/
http://copter.ardupilot.com/wiki/common-ppm-encoder-apm2x-atmega32u2/
- 先尝试新版本下的稳定模式,然后定高,然后悬停,最后是返航和自动模式。.
再次特别感谢Marco, DaveC和其余测试人员,冒险对新程序进行了测试。他们的一些视频大家可以在这里, 这里, 这里, 这里, 这里 和这里. 感谢 MichaelO 针对现有发布版本对地面站的改动。
欢迎回复。请在下方留下你的疑问或者评论。
由Craig添加:
请观看Randy’s设置和使用APM-Copter 3.0的视频. 他们非常棒!
3DR Quad Set-Up Suggestions http://www.youtube.com/watch?v=33Tl_rjhQEE
AC 3.0 “Live” Compass Calibration http://www.youtube.com/watch?v=DmsueBS0J3E
AC 3.0 CompassMot Setup http://www.youtube.com/watch?v=0vZoPZjqMI4
AC 3.0 Pre-Arm Checks http://www.youtube.com/watch?v=gZ3H2eLmStI
AC 3.0 Fence http://www.youtube.com/watch?v=HDnGdo54o-4
AC 3.0 Maiden Flight Checks http://www.youtube.com/watch?v=NOQPrTdrQJM
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号