



















Pixhawk代码分析-准备
Pixhawk代码分析准备篇
实验平台
Software Version:ArduCopter(Ver_3.3)
Hardware Version:pixhawk
IDE:eclipse Juno (Windows)
组件购买
- Pixhawk飞控 X 1个
- 电调 4个
- 电机 4个
- 锂电池 22000 3C 1个
- 电源模块 1个
- 螺旋桨 4个
- 安全开关 1个
- 蜂鸣器 1个
- 数传接收和发射 1套
- 图传接受和发射 1套
- GPS 1个
- 机架F450 1套
- 遥控器和接收机 1套
- PPM编码器 1个
- 平板 1个
- 云台 1个
- 相机 1个
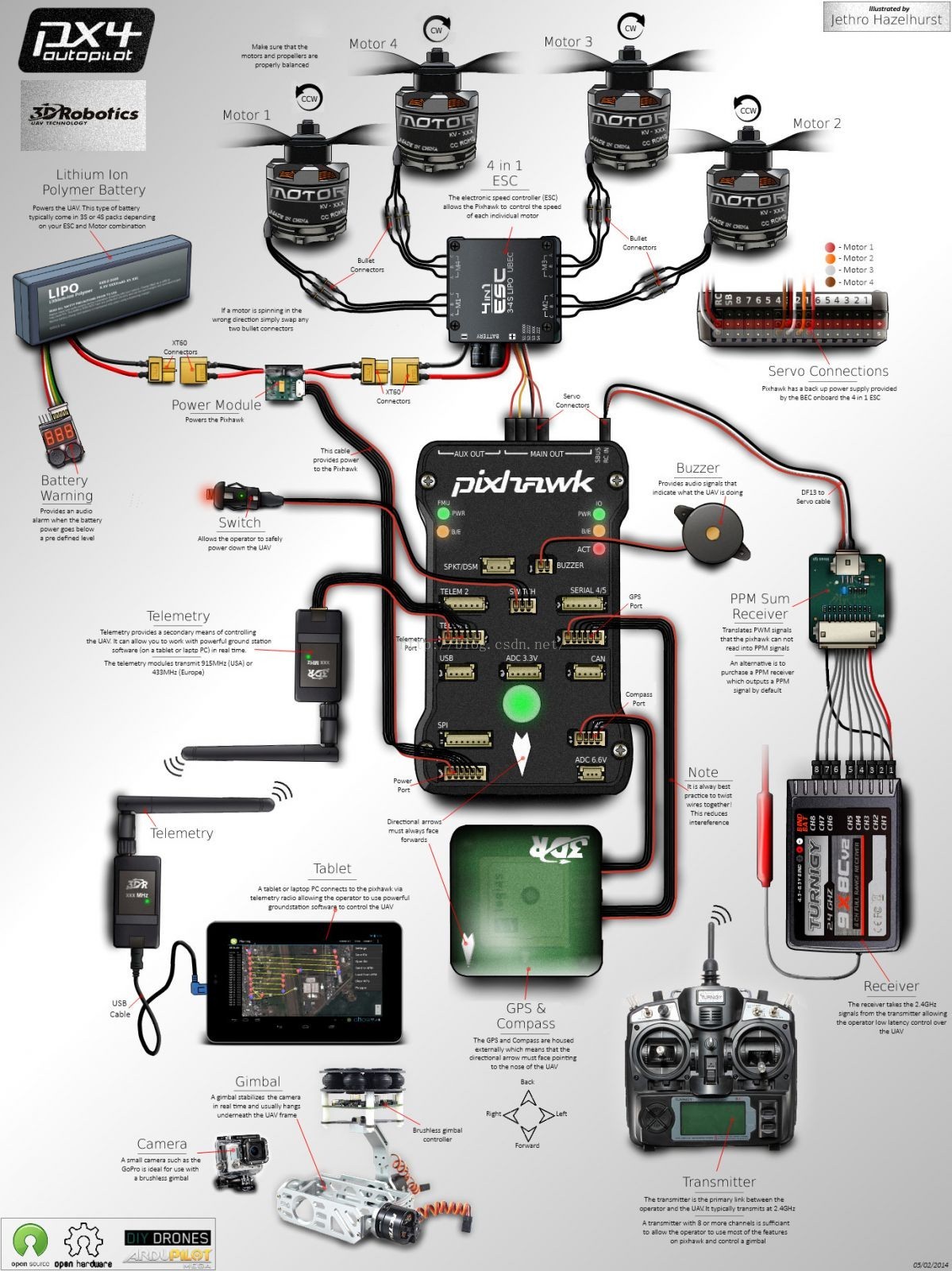
图示连线:
组装和试飞
- 本站参考:Pixhawk快速入门
- 本站参考:Pixhawk无人机教程-目录
- 官方参考:http://copter.ardupilot.com
- 官方参考:http://dev.ardupilot.com
组装后进行各种校准,可以参考本站教程或官网的方法。
开发环境搭建
官网编译说明:http://ardupilot.org/dev/docs/building-the-code.html
- windows下环境搭建
- Windows和Eclipse开发环境:http://ardupilot.org/dev/docs/editing-the-code-with-eclipse.html
- http://blog.csdn.net/wangcfan/article/details/51271608
- http://blog.csdn.net/bolvtin/article/details/47666927
- http://www.bubuko.com/infodetail-961872.html
- Linux下开发环境搭建
- Linux Make开发环境:http://ardupilot.org/dev/docs/building-px4-for-linux-with-make.html
- http://www.gwiily.com/quadrotor/pixhawk/10.html
- http://www.cnblogs.com/lovechen/p/5708893.html
- http://blog.csdn.net/a13526758473/article/details/51992978
- http://blog.csdn.net/wangcfan/article/details/51271608
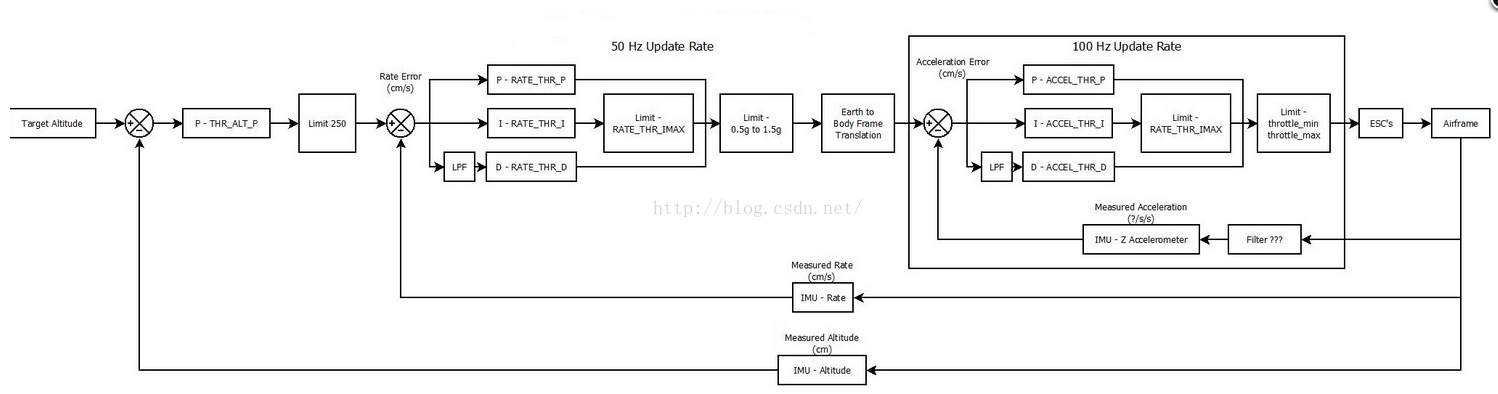
UAV的定高三级反馈控制原理图:(右键查看图片则是清晰大图)
总结
- 试飞注意安全,要在空阔人少的地方
- 环境搭建不容易,需要有耐心
- 入手开发知识储备:比如数据融合、姿态结算、卡尔曼滤波、PID控制、模糊控制等等
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号