



















Arduino小车-黑线循迹实验
简介
- 本小车集成循迹红外传感器电路。
连接图
- 按键报警连线
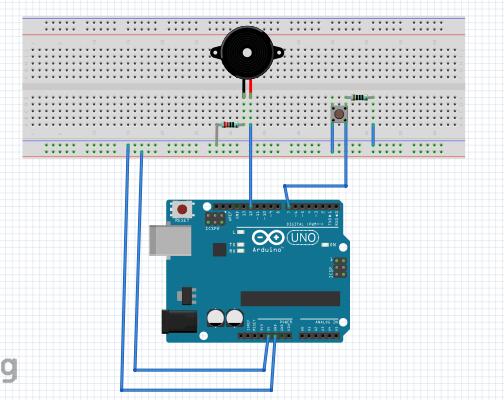
- 循迹红外传感器连线
P3.2/OUT1 → Arduino/pin3
P3.3/OUT2 → Arduino/pin4
步骤
- 先调试中间两个循迹红外传感器的变阻器,使传感器在白纸上变亮,在黑纸上会变暗。
- 打印宽度为5厘米左右的黑条,组成路线
- 下载代码,测试循迹功能
代码
//===============================================================
// 智能小车黑线循迹实验
//===============================================================
//#include <Servo.h>
int Left_motor_back=5; //左电机后退(IN1)
int Left_motor_go=6; //左电机前进(IN2)
int Right_motor_go=9; // 右电机前进(IN3)
int Right_motor_back=10; // 右电机后退(IN4)
int key=7;//定义按键 数字7 接口
int beep=12;//定义蜂鸣器 数字12 接口
const int SensorRight = 3; //右循迹红外传感器(P3.2 OUT1)
const int SensorLeft = 4; //左循迹红外传感器(P3.3 OUT2)
int SL; //左循迹红外传感器状态
int SR; //右循迹红外传感器状态
void setup()
{
//初始化电机驱动IO为输出方式
pinMode(Left_motor_go,OUTPUT); // PIN 5(PWM)
pinMode(Left_motor_back,OUTPUT); // PIN 6 (PWM)
pinMode(Right_motor_go,OUTPUT);// PIN 9 (PWM)
pinMode(Right_motor_back,OUTPUT);// PIN 10 (PWM)
pinMode(key,INPUT);//定义按键接口为输入接口
pinMode(beep,OUTPUT);
pinMode(SensorRight, INPUT); //定义右循迹红外传感器为输入
pinMode(SensorLeft, INPUT); //定义左循迹红外传感器为输入
}
//=======================智能小车的基本动作=========================
void run() // 前进
{
analogWrite(Right_motor_go,200);//右电机前进,PWM比例0~255调速,左右轮差异略增减
analogWrite(Right_motor_back,0);
analogWrite(Left_motor_go,200);// 左电机前进,PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
}
void brake() //刹车,停车
{
digitalWrite(Right_motor_go,LOW);
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW);
digitalWrite(Left_motor_back,LOW);
}
void left() //左转(左轮不动,右轮前进)
{
analogWrite(Right_motor_go,200); //右电机前进,PWM比例0~255调速
analogWrite(Right_motor_back,0);
digitalWrite(Left_motor_go,LOW); //左轮不动
digitalWrite(Left_motor_back,LOW);
}
void spin_left() //左转(左轮后退,右轮前进)
{
analogWrite(Right_motor_go,200); //右电机前进,PWM比例0~255调速
analogWrite(Right_motor_back,0);
analogWrite(Left_motor_go,0);
analogWrite(Left_motor_back,200);//左轮后退PWM比例0~255调速
}
void right() //右转(右轮不动,左轮前进)
{
digitalWrite(Right_motor_go,LOW); //右电机不动
digitalWrite(Right_motor_back,LOW);
analogWrite(Left_motor_go,200);
analogWrite(Left_motor_back,0);//左电机前进,PWM比例0~255调速
}
void spin_right() //右转(右轮后退,左轮前进)
{
analogWrite(Right_motor_go,0);
analogWrite(Right_motor_back,200);//右电机后退,PWM比例0~255调速
analogWrite(Left_motor_go,200); //左电机前进,PWM比例0~255调速
analogWrite(Left_motor_back,0);
}
void back() //后退
{
analogWrite(Right_motor_go,0);
analogWrite(Right_motor_back,150);//右轮后退,PWM比例0~255调速
analogWrite(Left_motor_go,0);
analogWrite(Left_motor_back,150);//左轮后退,PWM比例0~255调速
}
//==========================================================
void keysacn()//按键扫描
{
int val;
val=digitalRead(key);//读取数字7 口电平值赋给val
while(!digitalRead(key))//当按键没被按下时,一直循环
{
val=digitalRead(key);//此句可省略,可让循环跑空
}
while(digitalRead(key))//当按键被按下时
{
delay(10); //延时10ms
val=digitalRead(key);//读取数字7 口电平值赋给val
if(val==HIGH) //第二次判断按键是否被按下
{
digitalWrite(beep,HIGH); //蜂鸣器响
while(!digitalRead(key)) //判断按键是否被松开
digitalWrite(beep,LOW); //蜂鸣器停止
}
else
digitalWrite(beep,LOW);//蜂鸣器停止
}
}
void loop()
{
keysacn();//调用按键扫描函数
while(1)
{
//有信号为LOW 没有信号为HIGH
SR = digitalRead(SensorRight);//有信号表明在白色区域,车子底板上L3亮;没信号表明压在黑线上,车子底板上L3灭
SL = digitalRead(SensorLeft);//有信号表明在白色区域,车子底板上L2亮;没信号表明压在黑线上,车子底板上L2灭
if (SL == LOW&&SR==LOW)
run(); //调用前进函数
else if (SL == HIGH & SR == LOW)// 左循迹红外传感器,检测到信号,车子向右偏离轨道,向左转
left();
else if (SR == HIGH & SL == LOW) // 右循迹红外传感器,检测到信号,车子向左偏离轨道,向右转
right();
else // 都是白色, 停止
brake();
}
}
测试结果
- 小车沿着黑线行驶
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号