



















Arduino步进电机驱动-步进电机驱动扩展板(TMC260)
外观
.jpg)
简介
- 步进电动机是一种将脉冲信号变换成相应的角位移(或线位移)的电磁装置,是一种特殊的电动机。
- 一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入肘步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。
- 现在步进电机应用的领域越来越多。你也想要用Arduino控制你的步进电机吗,那将会有许多有趣的应用,如绘画仪,3D打印机,自动窗帘..?然而,市面上很难找到能够驱动步进电机的Arduino扩展板。让很多Arduino爱好者无法使用这一功能强大,转动精确的电机。但是现在不同了!DFRobot隆重推出步进电机扩展板,让你的Arduino主控轻松驱动步进电机。
- 该步进电机驱动扩展板子上拥有一块TMC260步进电机驱动模块(最大电流可达2A)。最高电压40V。
技术规格
- 适用于双极性步进电机的驱动。
- 通过简单便捷的SPI串行总线控制或STEP/DIR信号控制。
- 兼容Arduino UNO R3、Leonardo、Mega等控制器,具备完整端口扩展功能。
- 内部集成64bitDAC自身可实现256倍的微步细分功能。
- 集成过流,短路,过温等保护与诊断功能。
- 高精度无传感器电动机负载检测。
- 可以实现通过外部的模拟信号来实现任意的细分控制。
- 带有专利技术StallGuard功能可以实现无需传感器精确测试电机负载。
- 内部自带256细分可以实现在低速时候平滑控制。
- 高速驱动能力,可以驱动普通的2相步进电机达到5000RPM(注:一般步进用于低速环境不会超过1000RPM)。
- 低功耗,高效率的RDS-ON电源设计 。
- 7V-40V电机驱动电压。
- 带有专利技术Coolstep可以根据电机的负载自动调节驱动芯片输出的电流,避免因为超载而丢步,也减少电机的发热量,和其他驱动芯片相比节省75%的能量。
接口说明
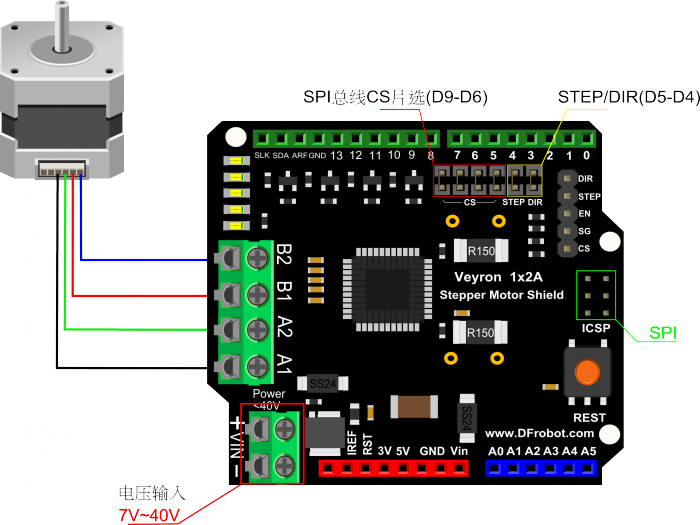
步进电机驱动扩展板引脚说明和连接图
引脚说明
我们在扩展板上额外引出了一些引脚,以方便玩家使用跳帽连接驱动芯片上的必要引脚。不用再使用缠人的杜邦线了!
- CS片选端:可以通过跳线帽进行CS片选的选择,顺序依次为D6,D7,D8,D9,从而实现SPI总线模式。
- STEP pin:可以通过跳线帽直接通Arduino上的D5引脚连接。
- DIR pin:可以通过跳线帽直接通Arduino上的D4引脚连接。
- ICSP pin:SPI连接引脚。
步进电机科普
指标术语
1、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(504)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
4、定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)。
5、静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
动态指标术语
1、步距角精度:步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步:电机运转时运转的步数,不等于理论上的步数。称之为失步。
3、失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5、最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
6、电机正反转控制:当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
步进电机驱动方式
- 功率放大是驱动系统最为重要的部分。
- 步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。
- 平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。
- 因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。
电机选择
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。
- 1、步距角的选择
电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度 (三相电机)等。
- 2、静力矩的选择
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)。
- 3、电流的选择
静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流。
TMC260驱动器
控制方式
- TMC260驱动芯片有两种控制方式接口:SPI串行接口和STEP/DIR接口。
- SPI串行接口使用来设置芯片寄存器和读取芯片寄存器值,驱动电机需要通过SPI接口设置初始化参数和模式,在SPI模式下也可以用来设置通过电机线圈的电流,从而代替STEP/DIR的驱动方式,因此我们可以单独通过SPI接口控制步进电机。
- 只使用SPI接口需要占用CPU时间来查找正弦表值不断发送线圈的电流值。(注:我们的开发者在datasheet中并没有发现具体的这个sin表值的计算,出于科学严谨态度开发者就没有将sin电流计算方式公布,同时也欢迎广大使用者共同开发)
- STEP/DIR接口是一种传统的电机控制方式,STEP给出PWM脉冲,DIR方向控制。
SPI控制模式
- SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
- 同TMC260或者TMC261通信是发送一个20位命令字和接收一个20位状态字。
- SPI模式通常用于微步率较低的速度,在高速度情况下可能会需要到CPU计算速率10-100/s的指令,因此,应用时需要调整整步的分辨率。
STEP/DIR
- STEP/DIR模式在默认的情况下是启用的,在每一个信号跳变时,DIR引脚的输入状态电平决定电机前进或者后退,每一个步距角都可以分为整步或者微步运行,一个整步可以分为2、4、8、16、32、64、128或256个微步。
- 在微步控制,DIR输入为低电平状态每一个阶跃信号将会增加内部微步计数器值,一个内部表将计数器的值转换为正弦和余弦值为微步控制电动机的电流。
TMC260控制方式选择
- SPI模式:SDOFF位置高,STEP/DIR接口失能,通过DRVCTR指定每个线圈的通过电流。
- STEP/DIR模式:SDOFF位置低,STEP/DIR接口使能,通过DRVCTRL配置寄存器的值设置STPE/DIR接口。
TMC260库使用实例
好了,前面说了这么多,难道需要我们的使用者具体去了解这些什么参数怎样设置,寄存器怎样配置,配置什么值,不,我们为使用者做了适配的库函数,只需要知道怎样使用我们的库函数就行了。当然,每一个步进电机的参数不相同,需要使用者自己去调试一些参数,如果觉得这些很麻烦,请直接使用我们的步进电机[混合式步进电机-42BYGH1861A-C]。
SPI演示代码 在SPI模式下,将下面演示代码下载到Arduino上,即可控制电机运行,注意这里的微步功能并没有完全的使用,我们这里需要对这个函数(tmc26XStepper.SPI_setCoilCurrent(200))给一个sin电流值。
/***************************************************
TMC260 Stepper Motor Driver Shield
<http://www.dfrobot.com/index.php?route=product/product&product_id=1360&search=tmc260&description=true#.Vp9Lrh6OCx8>
***************************************************
This example show how to control stepper motors.
Created 2015-6-11
By Bruce Hee <Loan.he@dfrobot.com>
Modified 2015-6-11
By Bruce Hee <Loan.he@dfrobot.com>
GNU Lesser General Public License.
See <http://www.gnu.org/licenses/> for details.
All above must be included in any redistribution
****************************************************/
/***********Notice and Trouble shooting***************
1.Connection and Diagram can be found here
<http://www.dfrobot.com/wiki/index.php?title=TMC260_Stepper_Motor_Driver_Shield_SKU:_DRI0035>
2.This code is tested on Arduino Uno, Leonardo, Mega boards.
3.SHT1x library is created by jonoxer.
See <https://github.com/CainZ/TMC260-Stepper-Motor-Driver-Shield> for details.
****************************************************/
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 300mA
TMC26XStepper tmc26XStepper = TMC26XStepper(200,6,4,5,800);
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("TMC26X Stepper Driver Demo App");
Serial.println("==============================");
//set this according to you stepper
Serial.println("Configuring stepper driver");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0);
tmc26XStepper.setRandomOffTime(0);
tmc26XStepper.SPI_setCoilCurrent(100);
tmc26XStepper.setMicrosteps(128);
tmc26XStepper.setStallGuardThreshold(4,0);
Serial.println("config finished, starting");
Serial.println("started");
tmc26XStepper.SPI_setSpeed(80); //Set 80 revolutions per minute
tmc26XStepper.SPI_step(-200); //Sets the number of runs for 200 steps, reverse motor 1
tmc26XStepper.spi_start() ; //Motor starting
delay(2000);
tmc26XStepper.SPI_step(200); //Sets the number of runs for 200 steps, that motor is turn 1
tmc26XStepper.spi_start() ;
delay(2000);
tmc26XStepper.SPI_setSpeed(100); //Set 80 revolutions per minute
tmc26XStepper.SPI_step(-300); //Sets the number of runs for 300 steps, reverse motor 1.5
tmc26XStepper.spi_start() ;
delay(2000);
tmc26XStepper.SPI_setSpeed(120);
tmc26XStepper.SPI_step(400); //reverse motor 2.0
tmc26XStepper.spi_start() ;
delay(3000);
}
void loop() {
//Motor control can be written inside the loop functions, let motor repetitive movements
}
STEP/DIR模式下,将下面演示代码下载到Arduino上。
STEP/DIR演示代码
/***************************************************
TMC260 Stepper Motor Driver Shield
<http://www.dfrobot.com/index.php?route=product/product&product_id=1360&search=tmc260&description=true#.Vp9Lrh6OCx8>
***************************************************
This example show how to control stepper motors.
Created 2015-6-11
By Bruce Hee <Loan.he@dfrobot.com>
Modified 2015-6-11
By Bruce Hee <Loan.he@dfrobot.com>
GNU Lesser General Public License.
See <http://www.gnu.org/licenses/> for details.
All above must be included in any redistribution
****************************************************/
/***********Notice and Trouble shooting***************
1.Connection and Diagram can be found here
<http://www.dfrobot.com/wiki/index.php?title=TMC260_Stepper_Motor_Driver_Shield_SKU:_DRI0035>
2.This code is tested on Arduino Uno, Leonardo, Mega boards.
3.SHT1x library is created by jonoxer.
See <https://github.com/CainZ/TMC260-Stepper-Motor-Driver-Shield> for details.
****************************************************/
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation, CS pin 2, dir pin 6, step pin 7 and a current of 300mA
TMC26XStepper tmc26XStepper = TMC26XStepper(200,2,6,7,700);
int curr_step;
int speed = 0;
int speedDirection = 100;
int maxSpeed = 1000;
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("TMC26X Stepper Driver Demo App");
Serial.println("==============================");
//set this according to you stepper
Serial.println("Configuring stepper driver");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0);
tmc26XStepper.setRandomOffTime(0);
tmc26XStepper.setMicrosteps(32);
tmc26XStepper.setStallGuardThreshold(4,0);
Serial.println("config finished, starting");
Serial.println("started");
}
void loop() {
if (!tmc26XStepper.isMoving()) {
speed+=speedDirection;
if (speed>maxSpeed) {
speed = maxSpeed;
speedDirection = -speedDirection;
} else if (speed<0) {
speedDirection = -speedDirection;
speed=speedDirection;
}
//setting the speed
Serial.print("setting speed to ");
Serial.println(speed);
tmc26XStepper.setSpeed(speed);
//we want some kind of constant running time - so the length is just a product of speed
Serial.print("Going ");
Serial.print(10*speed);
Serial.println(" steps");
tmc26XStepper.step(10*speed);
} else {
//we put out the status every 100 steps
if (tmc26XStepper.getStepsLeft()%100==0) {
Serial.print("Stall Guard: ");
Serial.println(tmc26XStepper.getCurrentStallGuardReading());
}
}
tmc26XStepper.move();
}
TMC260库说明
TMC260库解析
- *TMC26XStepper(int number_of_steps, int cs_pin, int dir_pin, int step_pin, unsigned int current, unsigned int resistor)
number_of_steps:每选择一周的步数。
cs_pin:SPI片选端使能引脚。
dir_pin:电机转动方向引脚。
step_pin:电机驱动器STEP引脚。
resistor:电流检测电阻,默认为15欧姆(或150毫欧姆),在使用时可以不赋值。
- *TMC26XSet_SPICS(int cs_pin)
cs_pin:在 SPI总线模式下CS引脚选择。
- *setConstantOffTimeChopper(char constant_off_time, char blank_time, char fast_decay_time_setting, char sine_wave_offset, unsigned char use_current_comparator)
constant_off_time:时间设定,控制斩波器最低频率,对于大多数应用这个时间适合范围为5us-20us。可设置值为0-15.
blank_time:在一个系统时间周期内斩断时间间隔。可设置为0-54。
hysteresis_start:滞回起始设置,HEND该值是一个滞后偏移量值,可设置为1-8。
hysteresis_end:滞回结束设置,设置滞后结束值。可设置为-3-12。
hysteresis_decrement:滞回衰减量设置,此设置确定斜率的滞回时间和快速衰减滞回时间。
- *setCurrent(unsigned int current)
current:设置线圈电流。
- *SPI_setCoilCurrent(int Current)
Current:设置SPI模式下电机线圈电流大小,注意此时的设置范围0-248。
- *setMicrosteps(int number_of_steps)
number_of_steps:设置每一步间距的微步数。可设置为0-256。
- *setStallGuardThreshold(char stall_guard_threshold, char stall_guard_filter_enabled)
stall_guard_threshold:设置失速保护(StallGuard)阈值,以获取合理的StallGuard读数。
stall_guard_filter_enabled:失速保护使能(1),或者失能(0)。
- *step(int steps_to_move)
steps_to_move:设置STEP/DIR模式下前进步数,正负值确定电机运行方向。
- *setSpeed(unsigned int whatSpeed)
whatSpeed:设置STEP/DIR模式下每分钟的转数。
- *SPI_step(int spi_steps_to_move)
spi_steps_to_move:设置SPI模式下前进的步数,正负值确定电机运行方向。
- *SPI_setSpeed(unsigned int whatSpeed)
whatSpeed:设置SPI模式下每分钟的转数。
- *tmc26XStepper.move()
STEP/DIR模式下电机开始运行。
- *tmc26XStepper.spi_start()
SPI模式下电机开始运行。
TMC260资料下载
步进电机驱动扩展板原理图下载
TMC260技术手册下载
步进电机驱动扩展板库文件下载
本文整理于DFRobot wiki
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号