



















Arduino伺服电机驱动-Digital Servo Shield for Arduino
产品外观
产品说明
- 此板内部集成半双工电路。这意味着你的UART发送线被连接到所有的Cds55系列舵机。
- 因此: 当你通过数据线发送一个命令,所有的舵机都会收到信息。
- 但因为发送的信息中包含指定的舵机ID号, 所以只有ID号匹配的舵机才会处理该信息。
- 因为舵机可以用串行总线连接在一起,它可以连接至少200个舵机。每个都可以反馈它的位置,转速,转矩,电流,以及温度等。它可以做全角度的旋转,就像齿轮电机一样可以控制速度。
- 此特性使得它可以作为轮式机器人或履带机器人的马达。
应用领域
- 教育机器人
- 机械手
- 类人机器人
- 六足爬行机器人
- 任何其它使用伺服驱动的应用
特性列表
- 微控制器:Atmega8
- 供电:6.5-12V
- 兼容Arduino R3
- SPI接口(使用Ardruino数字口 10,11,12,13)
- 初级用户易于使用
- 为高级应用提供UART接口
- 7个舵机连接通道
- 内置半双工电路
- 板面:镀金
- 尺寸:59x53mm
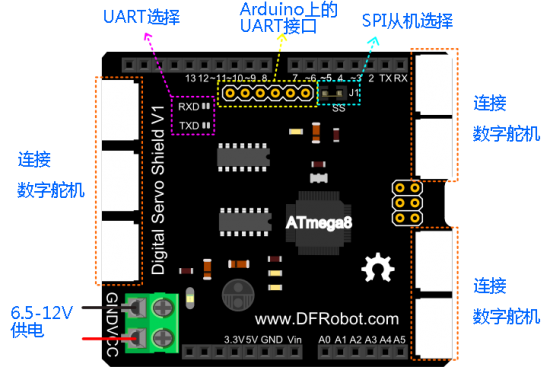
引脚说明
更多细节
- 供电:6.5~12V电源为舵机和整个系统供电
- UART选择:UART已经被焊锡短路.当你想在ATmega8上使用UART时请移除焊锡。
- ATmega8上的UART:此UART接口用于该扩展板的高级应用。你可以使用FTDI在板子上给ATmega8编程。
- SPI从机选择:默认是数字口10.如果你想使用其它数字口,请移除跳线,并连接ss接头到其它的Arduino数字口。
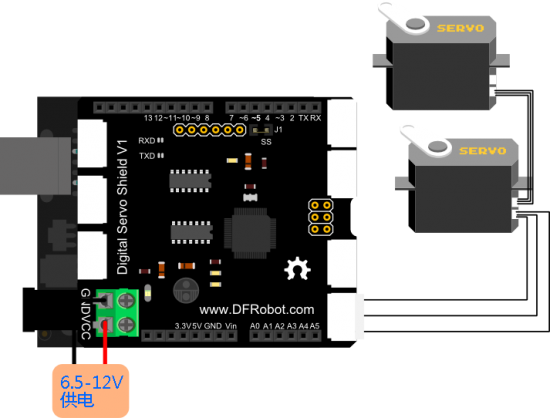
连接图表
示例代码
/* start code */
/*
# This Sample code is for testing the Digital Servo Shield.
# Editor : Phoebe
# Date : 2013.5.17
# Ver : 0.1
# Product: Digital Servo Shield for Arduino
# SKU :
# Hardwares:
1. Arduino UNO
2. Digital Servo Shield for Arduino
3. Digital Servos( Compatible with CDS55xx...etc)
4. Power supply:6.5 - 12V
*/
#include <SPI.h>
#include <ServoCds55.h>
#include "pins_arduino.h"
ServoCds55 myservo;
void setup (void) {
Serial.begin (115200);
digitalWrite(SS, HIGH);
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8);
}
void loop (void) {
if(Serial.available()){
char val = Serial.read();
if(val != -1) {
switch(val) {
case 'p':
myservo.write(1,300);//ID:1 Pos:300 velocity:150
delay(3000);
myservo.write(1,0);//ID:1 Pos:0 velocity:150
break;
case 'v':
myservo.setVelocity(100);// set velocity to 100(range:0-300) in Servo mode
break;
case 'm':
myservo.rotate(1,150);// CCW ID:1 Velocity: 150 middle velocity 300 max
delay(2000);
myservo.rotate(1,-150);// CW ID:1 Velocity: -150 middle velocity -300 max
break;
// case 'i':
// myservo.SetID(1,2);//ID:1 newID:2
// break;
//
// case 'r':
// myservo.Reset(2);//Restore ID2 servo to factory Settings ( ID:1 Baud rate:1000000)
// break;
}
}
else
Serial.println("Wait");
delay(500);
}
}
本文整理于 DFRobot wiki
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号