



















Arduino直流电机驱动-L298N双路H桥电机驱动
外观
简介
- 这个直流电机驱动模块是为了做ROBOT而开发的东东。当然,如果你有更好的想法,比如用于驱动步进电机也行。
- 我们做ROBOT的想法是:把大部分功能集成化,使得做机器人更加方便。
- DF-MD V1.3是续DF-MD V1.0之后的第3次改版,每一次改版其性能方面有很大的提升,DF-MDV1.3在原来的基础上增加了散热器,可以承受更大的电流;控制端口由原来的6个改为4个,不但可以节约控制器端口,而且控制方式也更为简单。
- DF-MD V1.3大功率直流电机驱动器采用LGS公司优秀大功率电机专用驱动芯片L298N,可直接驱动直流电机,驱动电流达2A。
- 该电路线路布线合理、均采用贴元件片、体积小、方便安装,输出端采用高速肖特基二极管作为保护。
产品参数
1.逻辑部分输入电压VD:6.5~12 V
2.驱动部分输入电压VS:4.8~35V
3.逻辑部分工作电流Iss:≤36mA
4.驱动部分工作电流Io:≤2A
5.最大耗散功率:25W(T=75℃)
6.控制信号输入电平:
高电平:2.3V≤Vin≤5V
低电平:-0.3V≤Vin≤1.5V
7.工作温度:-25℃~+130℃
8.驱动形式:双路大功率H桥驱动
9.模块尺寸:47 mm × 53mm
10.模块重量:约29g
引脚说明
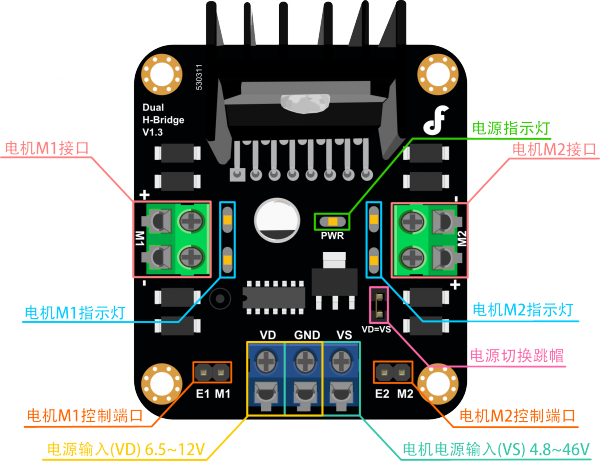
引脚说明图
电机接口
M1,M2 可接入两个电机,其中标注了“+”、“-”表示两个电机的正负极。
指示灯
- PWR: 电源指示灯
- 电机指示灯:电机正常工作,指示灯会亮起。
电源说明

- VD: 逻辑电源输入,输入电压范围建议为6.5V~12V;
- VS: 电机驱动电源输入,输入电压范围建议为4.8~46V;
- GND: 逻辑电源和电机驱动电源的公共地。
电源切换跳帽

电源切换跳冒
- 当跳冒插上时,逻辑电源和电机驱动电源相通。
- 如果电机驱动电源(VS)输入小于12V时,就可以将此跳线短接。
- 如果电机驱动电源(VS)输入大于12V时,不可将此跳冒短接。
电机控制端口
- E1,E2: 分别为两个电机控制的使能端(可使用PWM调速)。
- M1,M2: 正反转控制信号输入端。比如,M1=0,M1电机正转;M1=1,M1电机反转。
| E | M | 执行 |
|---|---|---|
| LOW | LOW/HIGH | 电机禁止 |
| HIGH | HIGH | 电机反转 |
| HIGH | LOW | 电机正转 |
| PWM | LOW/HIGH | 电机调速 |
注: LOW = 0; HIGH = 1; PWM = 0~255
使用教程
这个简单实例告诉你如何使用L298N双路电机驱动板驱动两个直流电机。
连线图
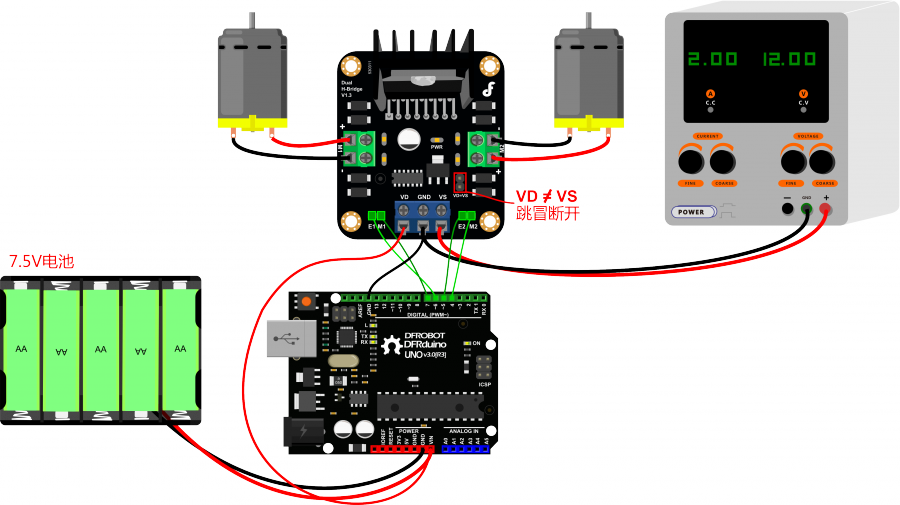
实例连线图
样例代码
int E1 = 6;
int M1 = 7;
int E2 = 5;
int M2 = 4;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, value); //PWM调速
analogWrite(E2, value); //PWM调速
delay(30);
}
}
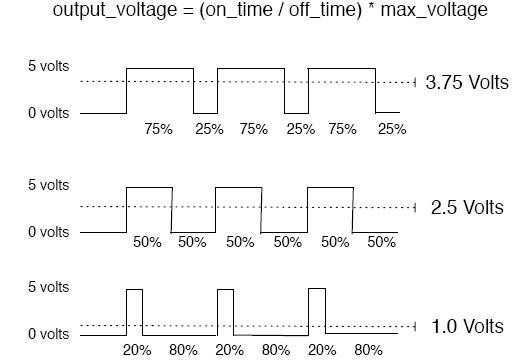
PWM调速原理
PWM调速是通过调整空占比来模拟不同电压值,从而控制加到电机两端的电压高低来实现调速。
本文整理于DFRobot wiki
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号