



















TurtleBot3入门教程#ROS2版#-Navigation2调参
文章说明
本教程主要介绍TB3在foxy下Navigation2中的参数调整
TB3的Navigation2调参文件主要在
turtlebot3_navigation2包的param文件下,修改时选择与当前对应的模型的yaml进行修改即可Navigation2有许多参数可以改变不同机器人的性能。虽然和ROS1 Navigation类似,但更多细节请参考Navigation2的配置指南或ROS Navigation Tuning Guide
参数介绍
Costmap Parameters
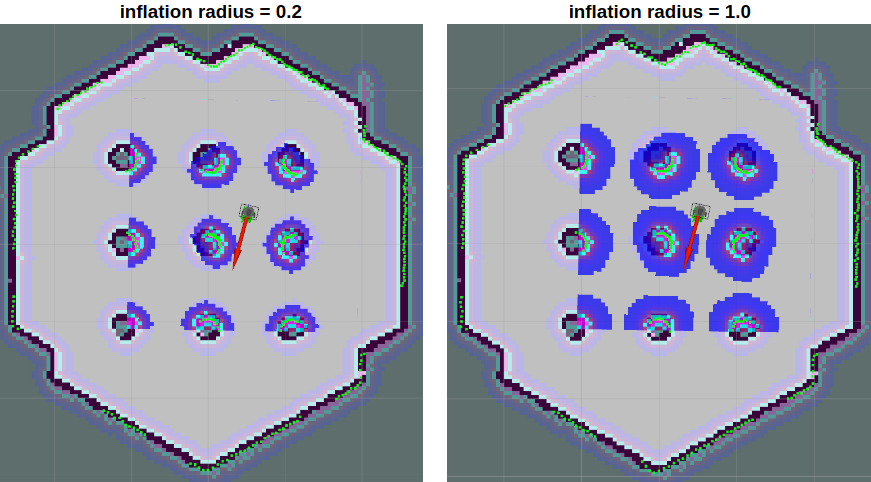
- inflation_layer.inflation_radius :障碍物在地图中向外扩展的膨胀层的半径,其一般设置为机器人的半径,有关更多信息,请参阅costmap_2d wiki
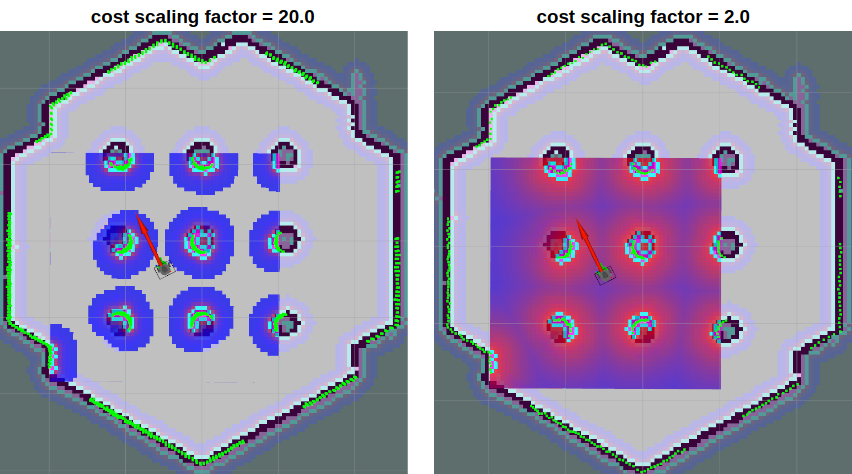
inflation_layer.cost_scaling_factor :膨胀过程中应用到代价值的反比例因子,如果增加这个参数,
costmap的值就会减少机器人穿过障碍物的最佳路径是从左右两个障碍物的中间穿过,将此参数设置为较小的值将创建距离障碍物更远的路径
dwb_controller
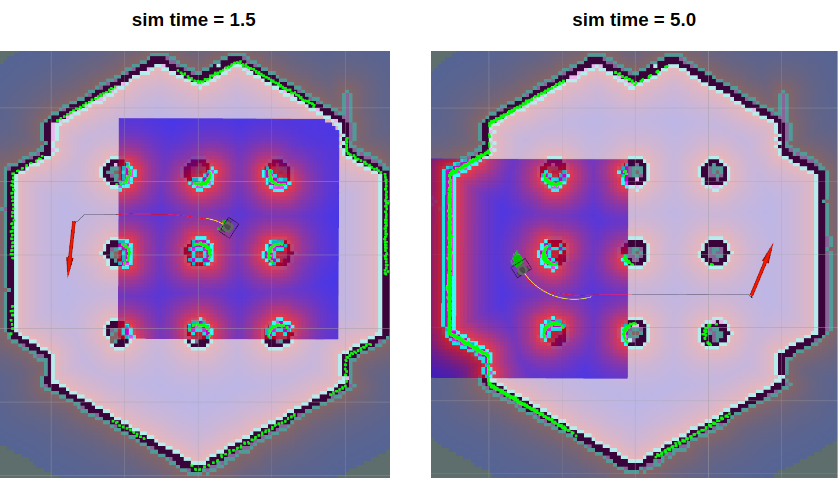
max_vel_x:机器人在x轴方向的最大速度min_vel_x:机器人在x轴方向的最小速度;如果设置为负数,则机器人能够向后移动max_vel_y:机器人在y轴方向的最大速度min_vel_y:机器人在y轴方向的最大速度max_vel_theta:机器人最大的角速度min_speed_theta:机器人最小的角速度,单位为rad/smax_speed_xy:机器人最大平移速度的绝对值,单位为m/smin_speed_xy:机器人最小平移速度的绝对值,单位为m/sacc_lim_x:机器人在x轴方向的最大加速度,单位为m/s^2acc_lim_y:机器人在y轴方向的最大加速度,单位为m/s^2acc_lim_theta:机器人最大角加速度,单位为m/s^2decel_lim_x:机器人在x轴方向的最大减速度,单位为m/s^2decel_lim_y:机器人在y轴方向的最大减速度,单位为m/s^2decel_lim_theta:机器人最大角减速度,单位为m/s^2xy_goal_tolerance:机器人到达目标位置时x,y值的容差yaw_goal_tolerance:机器人到达目标位置时偏向角的容差transform_tolerance:TF坐标变换的容差sim_time:向前模拟路径的时间。值太小,机器人难以通过窄小的空间;值过大会限制动态转弯,如下图黄线所示
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号