



















PX4与仿真入门教程-dronedoc-使用 LiDAR 进行 SLAM
PX4与仿真入门教程-dronedoc-使用 LiDAR 进行 SLAM
说明:
- 介绍使用 LiDAR 进行 SLAM
SLAM :
- 在使用 LiDAR 和 AMCL 的自我位置估计中,使用预先创建的地图执行自我位置估计,例如通过使用 Turtlebot 创建地图。
- 下面是节点和主题的示意图。 虚线是预先创建地图的工作中的节点的示例,在这种情况下,显示了使用costmap_2d的示例。
- 由于costmap_2d将根据sensor信息创建的占用网格图发布到/map主题,所以使用map_saver节点将发布的地图保存到文件中。
- map_server 节点读取以这种方式创建的现有地图并将其发布到 /map 主题。
- amcl节点根据发布的地图信息和传感器信息估计自己的位置,并广播TF。
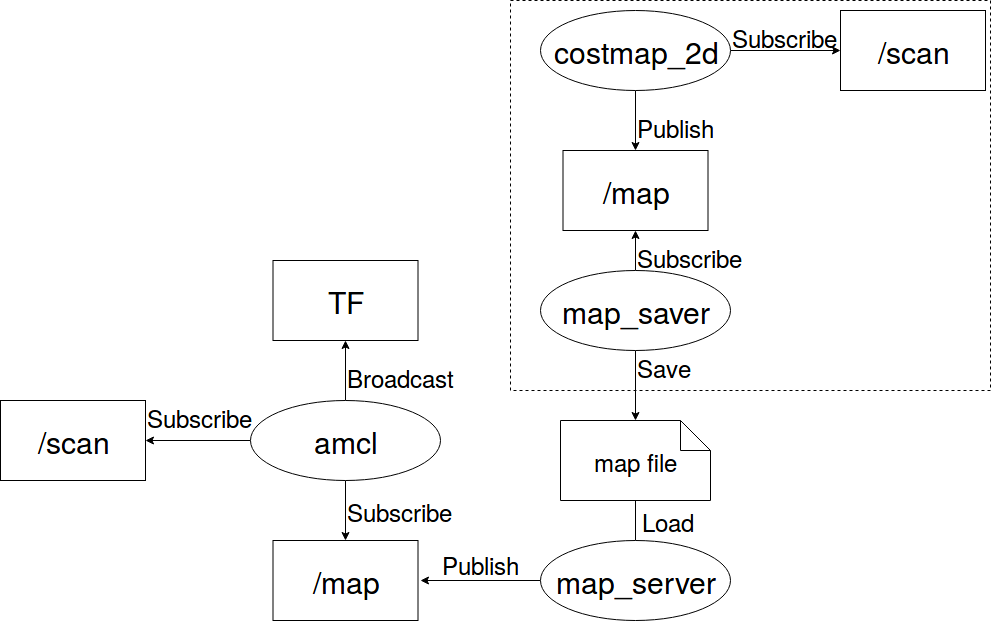
- 请注意,虚线内的制图和虚线外的自我位置估计不是同时进行的。
- 同时执行此操作称为 SLAM(同步定位和映射)。
gmapping 和 Hector SLAM
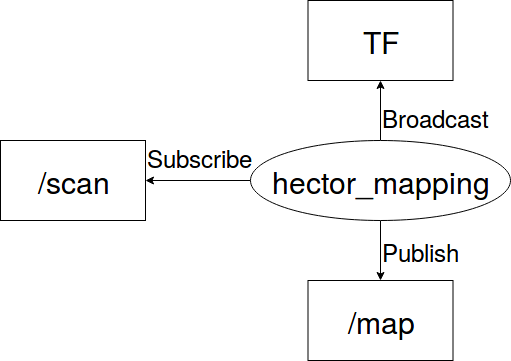
这一次,我们将使用 Hector SLAM 算法生成地图并估计自身位置。
使用Gmapping生成地图的gmapping也是SLAM算法之一。
虽然 gmapping 需要机器人里程计,但 Hector SLAM 是一种无里程计的 SLAM 技术。
在使用无人机时,往往很难获得里程计,因此Hector SLAM是一种适合无人机的SLAM方法。
对于使用作为 ROS 包提供的 LiDAR 的 SLAM 算法的比较,请参阅 ROS 的 LidarSLAM Summary-Qiita。
它使用 hector_slam 包,所以让我们使用以下命令安装它
sudo apt install ros-melodic-hector-slam
测试
- 启动 PX4 SITL 模拟器
- 启动 SITL 模拟器的 Launch 文件mymodel_sitl_hector.launch如下。
<launch>
<node pkg="tf" name="base2lidar" type="static_transform_publisher" args="0 0 0.1 0 0 0 base_link lidar_link 100"/>
<arg name="vehicle" default="iris_2d_lidar"/>
<arg name="world" default="$(find px4_sim_pkg)/worlds/willow_garage.world" />
<arg name="sdf" default="$(find px4_sim_pkg)/models/iris_2d_lidar/model.sdf" />
<arg name="verbose" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find px4)/launch/mavros_posix_sitl.launch" >
<arg name="sdf" value="$(arg sdf)" />
<arg name="vehicle" value="$(arg vehicle)" />
<arg name="verbose" value="$(arg verbose)" />
<arg name="debug" value="$(arg debug)" />
<arg name="world" value="$(arg world)" />
</include>
<param name="/mavros/setpoint_velocity/mav_frame" type="str" value="BODY_NED" />
</launch>
- 和mymodel_sitl_amcl.launch几乎一样,但是我去掉了参数设置部分,因为我不需要将tf从odom发布到base_link。
- 启动 hector_mapping 节点
- 我们将根据 hector_mapping 包中的 mapping_default.launch 进行更改,因此使用 roscp 命令复制文件。
roscp hector_mapping mapping_default.launch ~/dronedoc_ws/src/px4_sim_pkg/launch/
- 只需要更改以下三个值:
- 每个如下,因此请根据您的机器人进行设置。
基本框架/base_frame
机器人底座坐标系(框架)
odom_frame
机器人的里程计坐标系(框架)
scan_topic
已发表的激光扫描主题
- 另外,如果机器人的里程计不可用,则使base_frame和odom_frame的值相同。
- 有关在使用 hector_mapping 包时设置 TF 的信息,请参阅如何为您的机器人设置 hector_slam。
- 最终launch文件mapping_default.launch如下:
<?xml version="1.0"?>
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<arg name="base_frame" default="base_link"/>
<arg name="odom_frame" default="base_link"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="/laser/scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false"/>
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
<!--<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 map nav 100"/>-->
</launch>
测试:
- 新开终端,启动PX4 SITL模拟器
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4_sim_pkg mymodel_sitl_hector.launch
- 新开终端,我们将使用游戏手柄操作无人机,因此启动 mavteleop 节点
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4_sim_pkg mavros_teleop.launch
- 在启动仿真的终端下,启动起飞
commander takeoff
- 新开终端,让我们切换到 OFFBOARD 模式并驾驶无人机
rosrun mavros mavsys mode -c OFFBOARD
- 新开终端,启动 hector_mapping 节点
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4_sim_pkg mapping_default.launch
- 新开终端,启动Rviz
rviz
- 效果如图:

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号