



















PX4与仿真入门教程-dronedoc-offboard控制例子(python)
PX4与仿真入门教程-dronedoc-offboard控制例子(python)
说明:
- 介绍如何 编写python的ROS 节点来操作模拟中的无人机
步骤:
- 写一个节点,让无人机起飞2m以上
- 新建文件
mkdir ~/dronedoc_ws/src/px4_sim_pkg/script
cd ~/dronedoc_ws/src/px4_sim_pkg/script
vim offboard_sample.py
- 内容如下:
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import PoseStamped
from mavros_msgs.msg import State
from mavros_msgs.srv import CommandBool, CommandBoolRequest
from mavros_msgs.srv import SetMode, SetModeRequest
current_state = State()
def state_cb(msg):
global current_state
current_state = msg
def offboard_node():
rospy.init_node("offb_node")
r = rospy.Rate(20)
rospy.Subscriber("mavros/state", State, state_cb)
local_pos_pub = rospy.Publisher("mavros/setpoint_position/local",
PoseStamped,
queue_size=10)
arming_client = rospy.ServiceProxy("mavros/cmd/arming", CommandBool)
set_mode_client = rospy.ServiceProxy("mavros/set_mode", SetMode)
while not rospy.is_shutdown() and not current_state.connected:
r.sleep()
pose = PoseStamped()
pose.pose.position.x = 0
pose.pose.position.y = 0
pose.pose.position.z = 2
for i in range(100):
local_pos_pub.publish(pose)
r.sleep()
if rospy.is_shutdown():
break
offb_set_mode = SetModeRequest()
offb_set_mode.custom_mode = "OFFBOARD"
arm_cmd = CommandBoolRequest()
arm_cmd.value = True
last_request = rospy.Time.now()
while not rospy.is_shutdown():
if current_state.mode != "OFFBOARD" \
and (rospy.Time.now() - last_request > rospy.Duration(5)):
try:
offb_set_mode_resp = set_mode_client(offb_set_mode)
if offb_set_mode_resp.mode_sent:
rospy.loginfo("Offboard enabled")
except rospy.ServiceException as e:
rospy.logwarn(e)
last_request = rospy.Time.now()
else:
if not current_state.armed \
and (rospy.Time.now() - last_request > rospy.Duration(5)):
try:
arm_cmd_resp = arming_client(arm_cmd)
if arm_cmd_resp.success:
rospy.loginfo("Vehicle armed")
except rospy.ServiceException as e:
rospy.logwarn(e)
last_request = rospy.Time.now()
local_pos_pub.publish(pose)
r.sleep()
if __name__ == "__main__":
try:
offboard_node()
except rospy.ROSInterruptException:
pass
- 赋予权限,编译包
chmod +x offboard_sample.py
cd ~/dronedoc_ws/
catkin_make
- 编写luanch文件
- 进入目录包目录新建文件
cd ~/dronedoc_ws/src/px4_sim_pkg/launch
vim py_offb_sample.launch
- 内容如下:
<launch>
<include file="$(find px4)/launch/mavros_posix_sitl.launch" />
<node name="offb_node" pkg="px4_sim_pkg" type="offboard_sample.py" />
</launch>
测试:
- 新终端,启动模拟器和运行节点
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4_sim_pkg py_offb_sample.launch
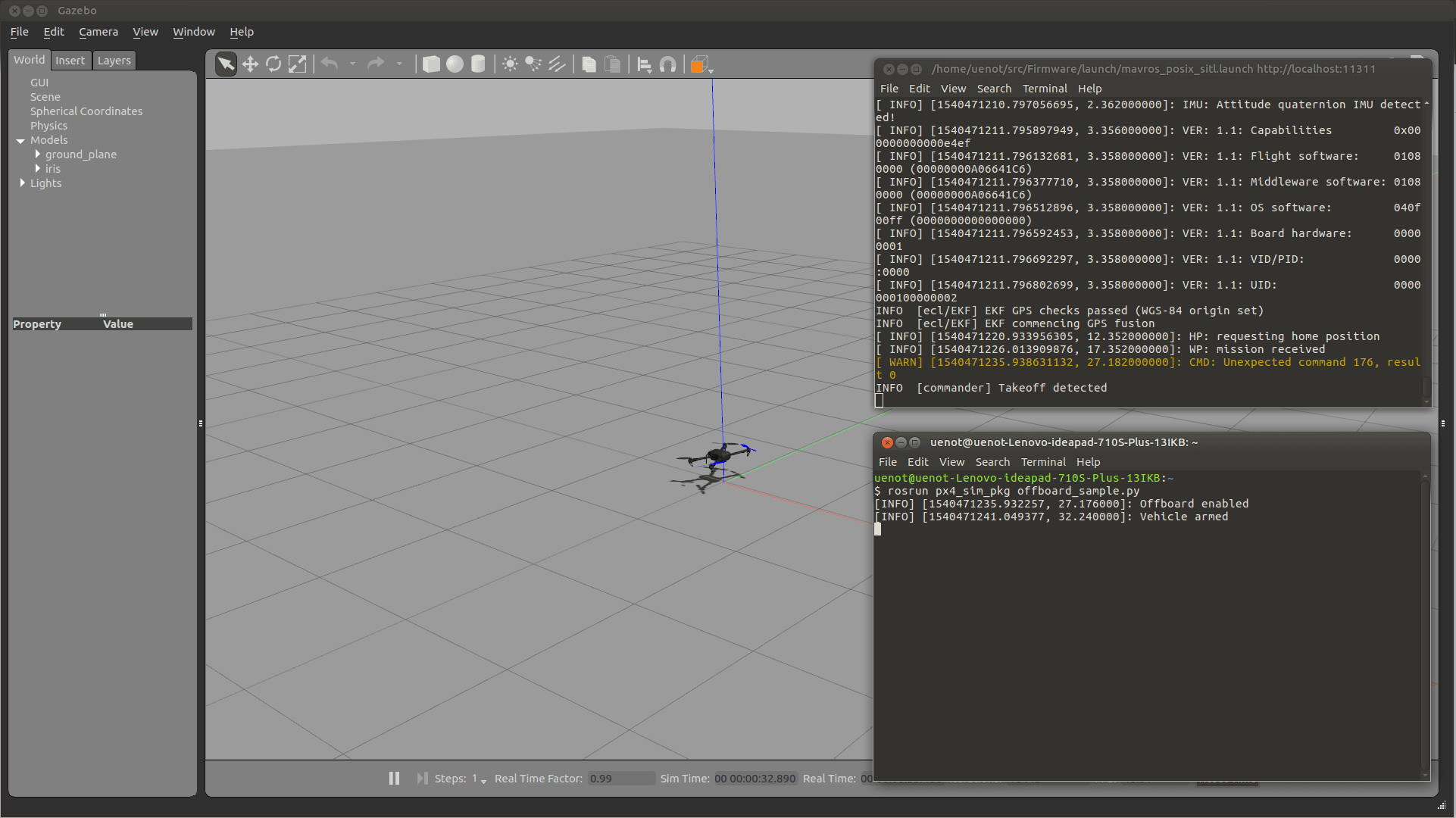
- 效果如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号