



















DashgoD1底盘新指南-6.3 树莓派使用gmaping建图
DashgoD1底盘新指南-6.3 树莓派使用gmaping建图
树莓派使用gmaping建图
本教程介绍使用Flash Lidar F4激光雷达、D1、树莓派3 进行 gmapping 建图。
若购买了EAI的树莓派3,树莓派的运行环境已经搭建了,只需要搭建PC端的环境。
树莓派上安装 Dashgo 包与 F4 驱动包
- Ctrl + Alt +T 打开终端,创建 dashgo_ws 工作空间
$ mkdir -p ~/dashgo_ws/src
$ cd ~/dashgo_ws/src
下载Dashgo包并切换到 SLAM 版本
$ git clone https://github.com/EAIBOT/dashgo.git $ cd dashgo $ git checkout slam_02下载激光雷达Flash Lidar F4驱动
$ cd ~/dashgo_ws/src $ git clone https://github.com/EAIBOT/flashgo.git $ cd flashgo $ git checkout 1.1.0然后编译
$ cd ~/dashgo_ws
$ catkin_make
- 编译完成后,增加环境变量到 ~/.bashrc 文件中,执行如下命令
$ echo "source ~/dashgo_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
- source ~/.bashrc使环境变量的配置生效。
树莓派串口访问权限
创建 dashgo 和 flashlidar 的串口别名的访问
$ roscd dashgo_bringup/startup $ sudo sh create_dashgo_udev.sh $ sudo sh create_flashlidar_udev.sh重新插拔连接树莓派的 USB 线与串口线
修改两端的hosts文件
树莓派修改/etc/hosts文件,让树莓派知道PC端的IP与主机名
sudo vim /etc/hosts
127.0.0.1 localhost
127.0.1.1 dahsgo-d1
172.20.105.96 eaibot #添加这行信息
# The following lines are desirable for IPv6 capable hosts
::1 ip6-localhost ip6-loopback
fe00::0 ip6-localnet
ff00::0 ip6-mcastprefix
ff02::1 ip6-allnodes
ff02::2 ip6-allrouters
PC端修改/etc/hosts文件,让PC端知道树莓派的IP与主机名
sudo vim /etc/hosts
127.0.0.1 localhost
127.0.1.1 eaibot
172.20.105.80 dahsgo-d1 #添加这行信息
# The following lines are desirable for IPv6 capable hosts
::1 ip6-localhost ip6-loopback
fe00::0 ip6-localnet
ff00::0 ip6-mcastprefix
ff02::1 ip6-allnodes
ff02::2 ip6-allrouters
注意:若没有设置两端的/etc/hosts文件,两端数据难以通信的。
树莓派运行扫地图主程序
$ roslaunch dashgo_nav gmapping_demo.launch
PC端运行rviz
- PC端安装rviz包(前提:ROS系统已经安装成功)
$ sudo apt-get install ros-indigo-serial ros-indigo-turtlebot-rviz-launchers
- PC端运行图形界面
$ export ROS_MASTER_URI=http://172.20.105.96:11311
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
注意:ROS_MASTER_URI 的 IP 要根据实际情况来定。
在正式建图前,需要对激光雷达与D1进行坐标校正,请看 “激光雷达与D1的坐标校正” 这章节。
键盘控制 D1 移动
- 树莓派端再启动一个窗口控制 D1 运动
$ rosrun dashgo_bringup teleop_twist_keyboard.py
树莓派端保存地图
- 控制 D1 运动建地图后,可保存地图。
$ roscd dashgo_nav/maps
$ rosrun map_server map_saver -f my_map
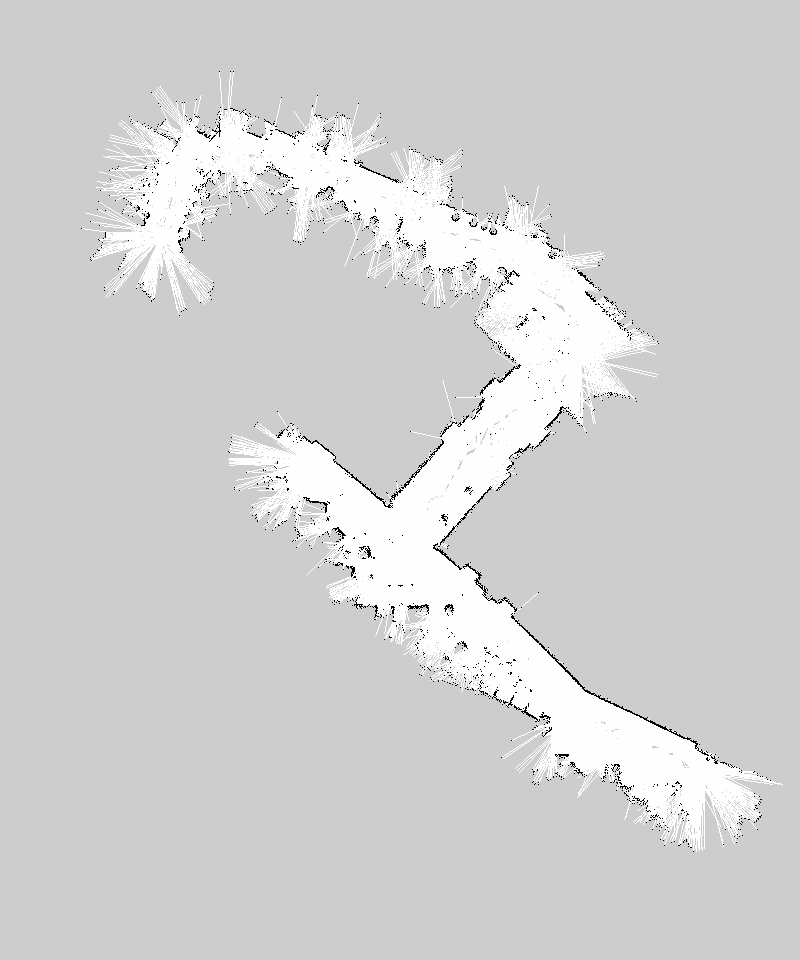
- 运行效果如下图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号