



















Kobuki入门教程-诊断
Kobuki入门教程-诊断
说明
- 介绍获取Kobuki的诊断信息
诊断信息
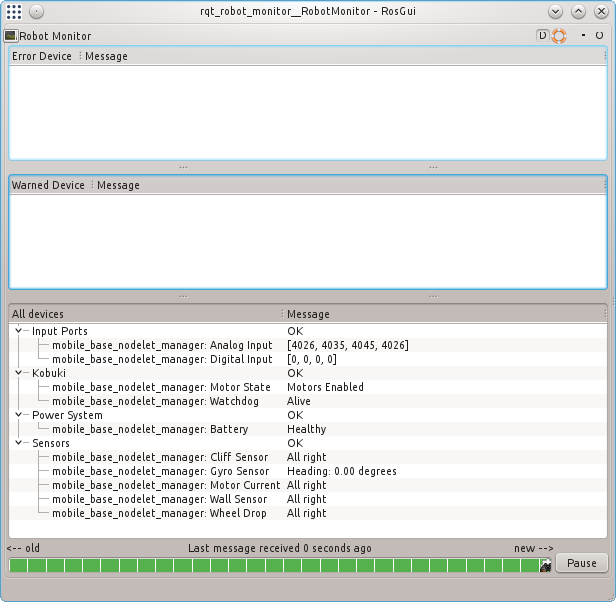
- Kobuki通过Robot Monitor GUI提供了典型的诊断信息:
- robot-laptop link watchdog
- robot battery status
- sensors: bumper, cliff, wheel drop, motor current, gyro
- input ports: analog, digital
Robot Monitor GUI(机器人监视器)
- 安装
$ sudo apt-get install ros-indigo-rqt-robot-monitor
- 启动
$ rosrun rqt_robot_monitor rqt_robot_monitor
- 图示:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号