



















walking机器人仿真教程-展馆导览-功能说明和航点制作
说明
- 介绍如何制作航点
功能说明
这个是基于展馆的导航应用,使用小车替代导览解说员
语音制作:每个展区的位置匹配的语音文件
航点制作: 先根据展馆地图,制作每个展区的位置点,并搭配展区的相应的语音介绍。
巡逻模式: 用户选择巡逻模式,小车自动从原点出发,依照航点设计,逐一导航,到达位置后自动播放录制的介绍语音,等所有航点的导航完,再回到起点。
目标模式: 用户选择指定的展区位置点,小车从当前位置导航到指定的位置点,到达位置后自动播放录制的介绍语音。并等待下一个目标点或者进入巡逻模式
语音模式:进入语音模式,用户需要说出唤醒词:小腾,然后说出位置语音:请导航到A1,当识别到这个语音匹配的A1坐标点,会自动导航到位置点,类似目标模式,只是用语音替代点击行为。到达位置后自动播放录制的介绍语音。并等待下一个目标点。再次说出唤醒词:小腾,然后说出语音:巡逻模式,当识别这个语音匹配到巡逻模式,则自动进入巡逻模式。开始逐一位置点导航。
语音制作
- 语音制作是把一段介绍性的文字转变为语音
- 通过语音合成方式,利用一些第三方工具来完成。
- 类似功能的在线网站也很多,参考网站1,生成之后再下载就可以
- 利用脚本实现,EdgeTTS来自EdgeGPT,可以自己补充相关内容
- 如下是参考脚本
# -*- coding: utf-8 -*-
from robot import TTS
import os
def run():
voice = "zh-CN-YunyangNeural"
tts = TTS.EdgeTTS(voice=voice)
msg = "介重点介绍从最早的UNIX、DOS到现代的Windows、macOS和Linux操作系统的发展史。展示各大操作系统的用户界面演进、技术创新和在不同领域的应用。"
file = tts.get_speech(msg)
print(file)
os.system("mplayer "+file)
if __name__ == "__main__":
run()
航点制作
- 启动仿真
cd ~/tools/pyqt/server/
python3 server.py
- qt效果图:
- gazebo效果图

- rviz效果图

- 点击启动服务即可
- 添加显示插件,WalkingNavigation

- 添加工具插件,Walking Goal

- 再通过工具插件,在地图上选择与展区匹配的坐标点

- 导出坐标点,点击save waypoints导出航点到航点文件。我们默认是保存在~/waypoints目录下,比如命名为iscas_museum_waypoints_intro.json
- 坐标点额外设置,默认导出的坐标点,还缺少相关内容,比如匹配到达目标点后行为,播放语音,设置位置点的名称,可以呈现在地图上。
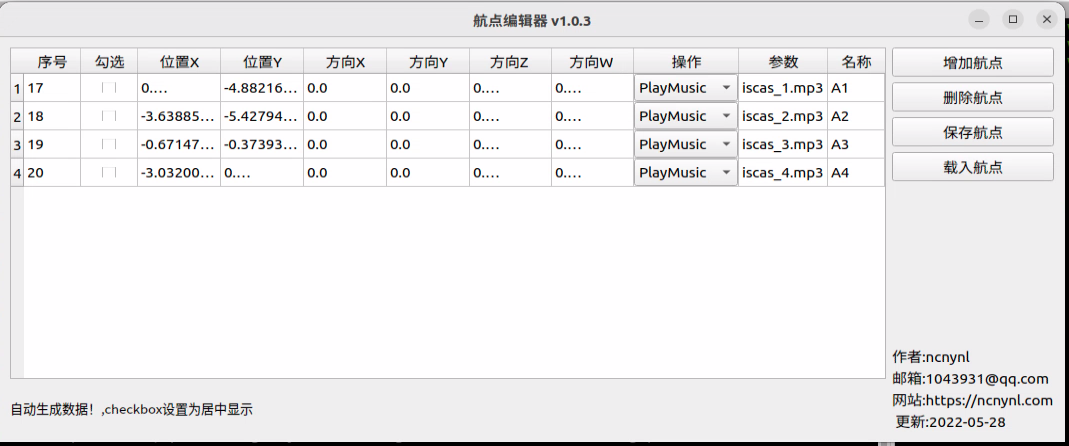
- 使用航点编辑器打开航点文件
python3 ~/tools/pyqt/waypoints/waypoints.py
- 点击载入航点,选择航点文件
~/waypoints/iscas_museum_waypoints_intro.json - 效果图

- 选择操作,输入位置名,效果图
- 再保存航点为新的航点文件,放于
~/waypoints/iscas_museum_waypoints_intro_ed.json - 这个文件将是后面一直会使用到的航点文件
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号