



















farmbot硬件入门教程-为什么我的 FarmBot 不动
说明:
问题描述:FarmBot 在移动方面遇到问题。本故障排除文档改编自 Marc Dingena 在 FarmBot 社区论坛上发表的一篇帖子。
本故障排除文档将指导您完成 FarmBot 设置、诊断工具和硬件检查的检查清单,以帮助您让 FarmBot 可靠地运行。您将从简单的操作开始进行故障排除。如果这些操作对您不起作用,您应该继续阅读本指南并执行其他操作来解决问题。完成每个步骤后测试您的设置,看看您的问题是否得到解决
确保 FarmBot 已连接
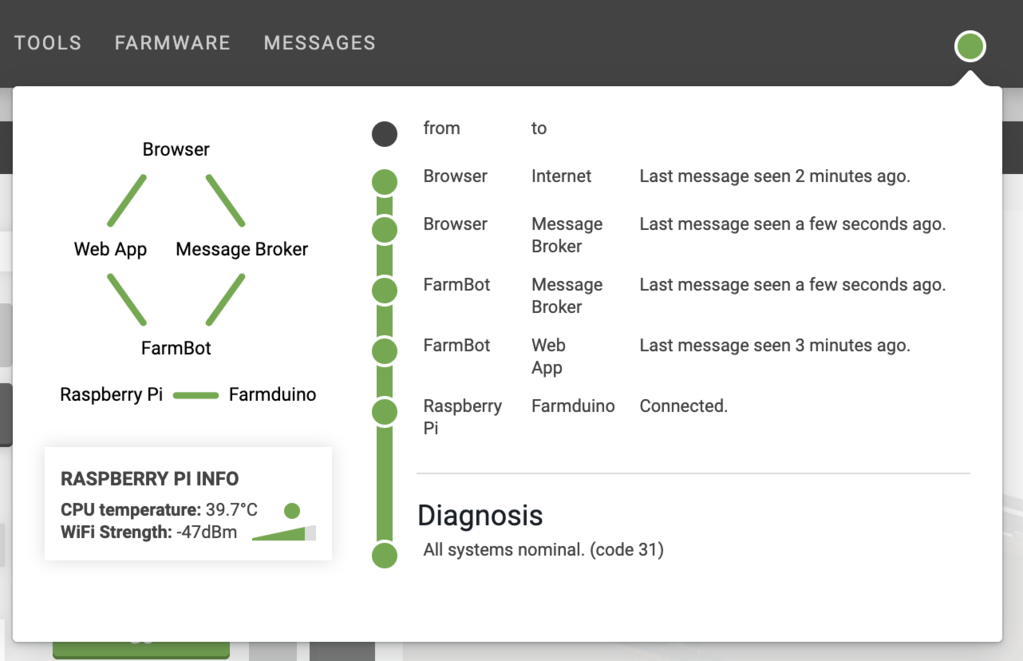
您的 FarmBot 必须连接到互联网和 Web 应用程序才能接收命令并下载您创建的资源(例如序列、植物位置和事件)。如果您的机器人已连接,Web 应用程序的连接指示器应为绿色。如果您的机器人未连接:
- 确认 FarmBot 已连接到互联网(通过 WiFi 或以太网)。
- 确认 FarmBot 已连接到 Web 应用程序。
当通信正常时,连接弹出窗口应显示代码 31 诊断代码。请参阅连接诊断代码页面以获取有关解决连接问题的更多帮助。
仔细检查你的固件选择
- 仔细检查应用程序中指定的型号和固件是否与 FarmBot 的实际型号相匹配。如果您错误地指定了 FarmBot 的型号,您将能够连接并且功能会受到限制。但是,电机可能无法工作
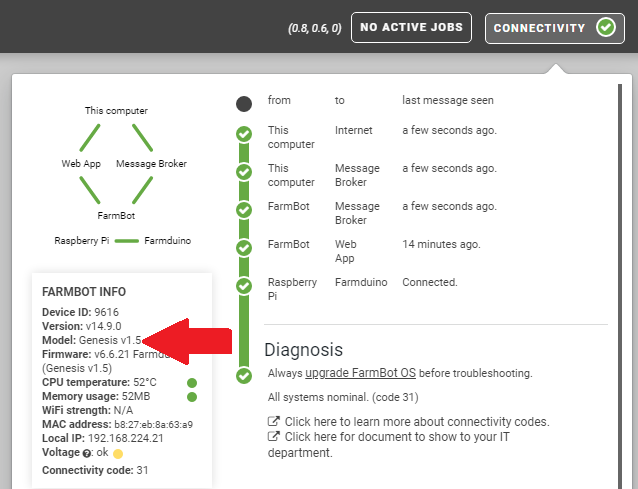
要更改型号和固件,请转到设置面板的固件部分,为您的 FarmBot 型号选择正确的固件。然后按FLASH FIRMWARE按钮。刷新固件可能需要长达 2 分钟。完成后,尝试发出电机运动命令。
如果这不起作用,您可以尝试使用 FarmBot OS 重新刷新 microSD 卡。
紧固龙门连接
仔细检查并拧紧固定机架的所有螺钉,确保系统不会出现“间隙”。机架需要充当一个刚性/刚性体。如果机架结构存在一些弯曲,则会导致移动延迟,因为结构在移动之前会先弯曲
通过拧紧龙门轮板和龙门角支架处的M5螺钉,将整个龙门结构紧固

平衡龙门架
- 均衡的龙门架是指与轨道完全垂直的龙门架,这样它就不会弯曲,也不会产生扭矩。X 轴轨道需要对齐。如果它们未对齐,则会导致龙门架弯曲或扭矩,从而导致吱吱作响、V 轮和电机过度磨损,并给系统带来大量摩擦。这些问题都会降低 FarmBot 系统的整体可靠性并缩短组件的使用寿命
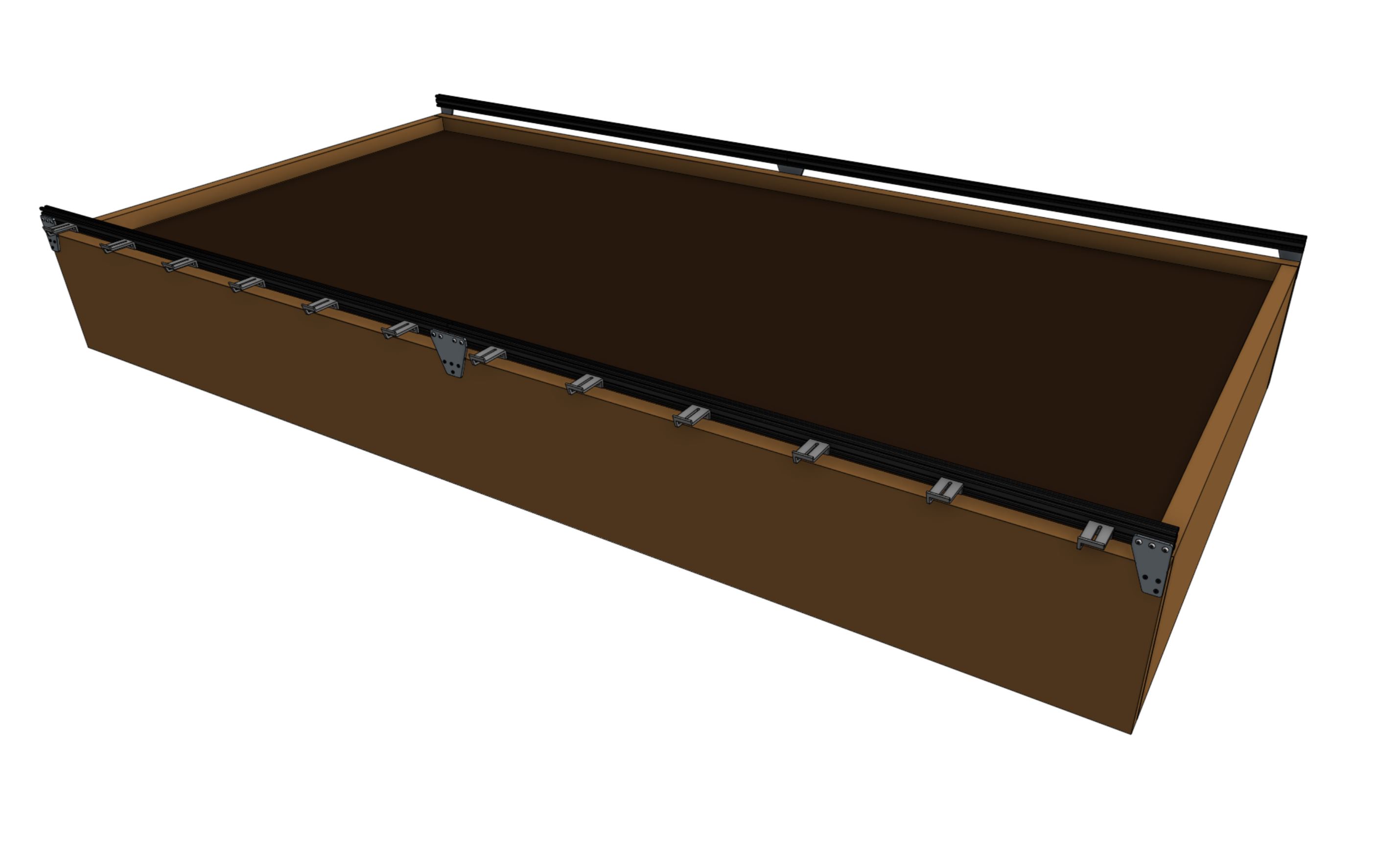
有关为 FarmBot 构建高架床支撑基础设施的详细说明位于此处
有关在 FarmBot 高架床支撑基础设施上安装轨道的详细说明位于此处
测试龙门架
要查看龙门架是否均衡,请拔下 X1 和 X2 电机上的电机电缆和旋转编码器电缆,以确保 x 轴电机断电。
从龙门架主梁中间轻轻推拉龙门架,使其沿轨道缓慢移动约 30 厘米。此过程将消除龙门架上的任何扭矩,并确保其不会弯曲。如果您从龙门架立柱之一或主梁中间以外的任何地方推拉龙门架,那么您将扭转龙门架并使其弯曲。
将机架从 x 轴的一端推到另一端应该很容易。如果您感觉到沿轨道来回移动时有阻力,则需要调整轨道或调整偏心垫片以消除阻力。
如果需要添加润滑剂来降低 V 型轮的阻力,请使用干性润滑剂,例如石墨粉。干性润滑剂不会积聚灰尘或污垢,也不会像液体润滑剂或油脂那样粘住轮子或轴承。请勿在皮带、滑轮或 V 型轮上使用液体润滑剂。
消除轨道阻力后,您需要重新连接电机和旋转编码器电缆。然后,您将从 Web 应用程序重新校准 FarmBot。

调整皮带张力
- 随着时间的推移,皮带可能会拉伸或滑动,从而导致错过步骤、过早磨损、龙门架卡在轨道上以及 FarmBot 动作精度下降

皮带张力调整步骤:
- 松开固定皮带的皮带夹。
- 拉动夹子以张紧皮带 -使用少量的张力
- 重新拧紧夹子。
- 确保检查所有三条皮带:两条沿着轨道,一条横跨龙门主梁。皮带不应承受过大的张力。如果承受过大张力,FarmBot 的电机将难以移动,并且会失步。使用少量张力 - 刚好足以使系统不松弛。
- 重新平衡龙门架以防止卡住。

调整偏心垫片
偏心垫片用于对铝挤压件两侧 V 形轮之间的间距进行微调。调整此间距是实现龙门架在轨道上、横滑块在龙门架主梁上以及 Z 轴在横滑块上上下移动的平稳无晃动的关键。
如果 V 型轮之间的间距太小,挤压件将无法完全适合 V 型轮之间,或者在移动时会产生很大的摩擦。如果间距太大,连接就会不稳定且松散。
按照我们的指南调整偏心垫片。调整偏心垫片后,将龙门架放回轨道上,重新将皮带送入传动系统,并将皮带固定回原位以进行正常运行。

更改电机设置
如果您在 FarmBot 的移动过程中遇到问题,请调整设置并降低电机失速的硬件阻力。您可以通过清洁轨道并确保皮带或滑轮上没有污垢或碎屑来降低硬件阻力。步进驱动器功率应该是您最后要尝试调整的东西,因为它很难调整并且很容易弄乱。
在对这些 NEMA 17 步进电机进行故障排除时,要记住的另一件事是,步进速率越快,扭矩越低。这意味着,如果您增加最小或最大速度(mm/s)(又称步进速率),您将降低扭矩并增加电机失速的可能性。本文档的下一节将讨论有关电机失速的更多详细信息。
提供的默认设置是电机硬件的推荐设置。如果您希望将任何这些设置恢复为默认值,可以将鼠标悬停在设置的工具提示上,以查看默认值图标。您还可以恢复所有设置。

- 这是相同的 FarmBot,但最低速度提高到 200 毫米/秒。没有失速,因为电机有能力克服轨道缺陷。
- 如果增加最低速度不能解决问题,您可以尝试降低最低速度的替代策略并增加“加速”步数。
电机堵转
如果您遇到电机失速问题,请调整软件设置并降低硬件阻力。
电机停转是因为电机没有足够的额外扭矩来克服机械阻力。电机停转时会发出嗡嗡声。默认电机最大重试次数为 3 次,此设置可调整,但我们建议将其保持在 3 次尝试。下面的视频显示电机快速尝试移动三次,但每次都失败了。如果你仔细听视频,6 秒后你可以听到电机连续三次停转。然后在 12 秒时,操作员尝试再次移动 Z 轴,你可以听到电机停转的嗡嗡声。
通过降低最小速度值和增加“加速”步数,解决了 z 轴上的这个失速问题。
下面的视频显示了电机加速然后失速的过程。FarmBot Y 轴电机加速到共振点然后失速,可能是因为振动增加了系统的最大负载。您可以在此视频中看到电机加速然后失速并停止六次。最后系统完全停止,因为它达到了最大重试限制。
建议的纠正措施是消除皮带的松弛并降低最大速度。这些措施解决了失速问题。
编码器故障排除
- 在本故障排除文档中了解如何解释和诊断常见的编码器问题、导致这些问题的原因以及如何修复这些问题。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号