



















farmbot入门教程-杂草检测
说明:
介绍如何使用 FarmBot 的相机检测杂草
要使用杂草检测功能,必须先校准相机
步骤:
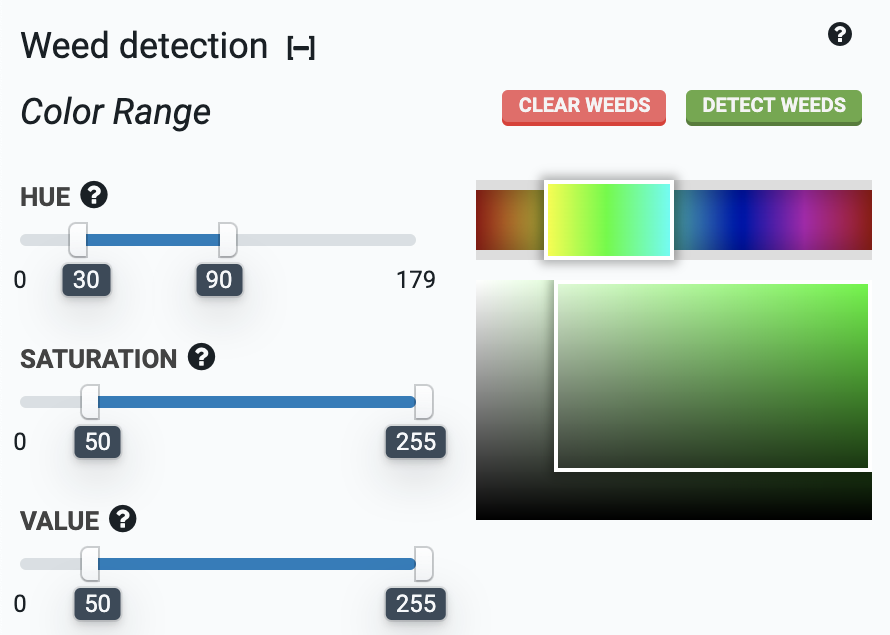
- 选择颜色范围。杂草检测软件需要寻找一系列颜色来判断哪些是植物,哪些是土壤或其他背景。使用“色调”、“饱和度”和“值”滑块来选择要检测的颜色范围。颜色框将指示所选范围。对于色调滑块,绿色范围30约为90
- 检测杂草。将 FarmBot 移到土壤的某个区域。按“检测杂草”按钮指示 FarmBot 拍照,然后使用杂草检测软件处理该图像。图像中发现的任何杂草都将出现在地图上,并在杂草面板中列为“待处理” 。有关更多信息

扫描整个花园。通过在每个网格点处使用检测杂草命令以网格模式创建一系列移动来检测 FarmBot 整个床上的杂草。有关分步说明,
使用 FarmBot 除草。可以通过创建除草序列来执行除草,该序列在农场设计器中使用除草工具对杂草进行除草
如果我们处理花坛的照片而不提供任何信息,我们会检测到图像中的所有植物

我们想确定什么是杂草,以及杂草的位置。因此,我们向植物检测软件输入一些校准参数,让它确定图像中物体的位置。根据图像中所需植物的已知位置,我们可以确定哪些植物是所需植物,哪些是杂草
已知(所需)植物用绿色圆圈标记,与所需植物匹配的检测到的植物用蓝色圆圈标记,与所需植物不匹配的检测到的植物用红色圆圈标记(这些是杂草):

可以看到显示坐标系的网格覆盖,并且图像已稍微旋转以适应相机旋转
但是等一下!我们的除草工具有一定的尺寸,并且会破坏一定区域内的土壤,即其影响区域。我们可以用灰色圆圈表示被破坏的区域:
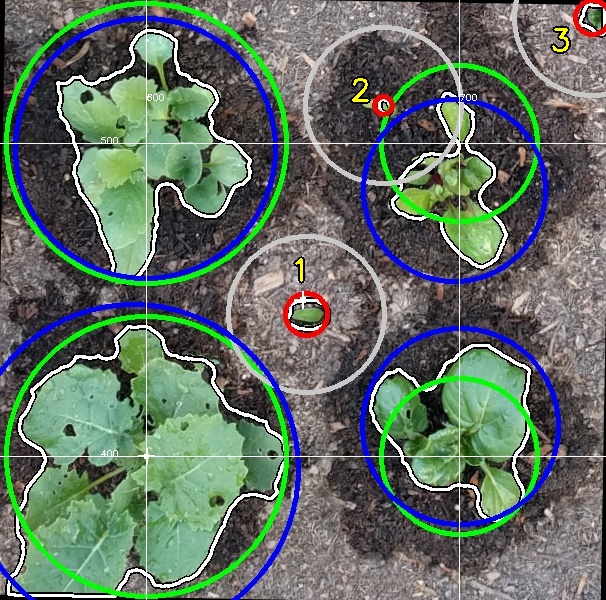
我们看到,除草机在除草编号为 的杂草时可能会影响左下方的植物,因为其影响区域与所需植物的圆圈相交。我们还看到,如果不严重破坏右上方的植物,1我们就无法除草。我们可以安全地除草2 3
该软件通过“安全移除”功能将除草工具的尺寸考虑在内
它会调整要除草的位置,使其1远离左下方的植物,并将杂草2从列表中移除,因为无法安全移除,并保留3在要移除的杂草列表中,因为没有冲突。您可以看到要移除的杂草和除草机位置与之前一样用红色和灰色圆圈表示,青色圆圈表示可能无法完全移除(或根本无法移除)的杂草,因为此操作可能会损害所需的植物:
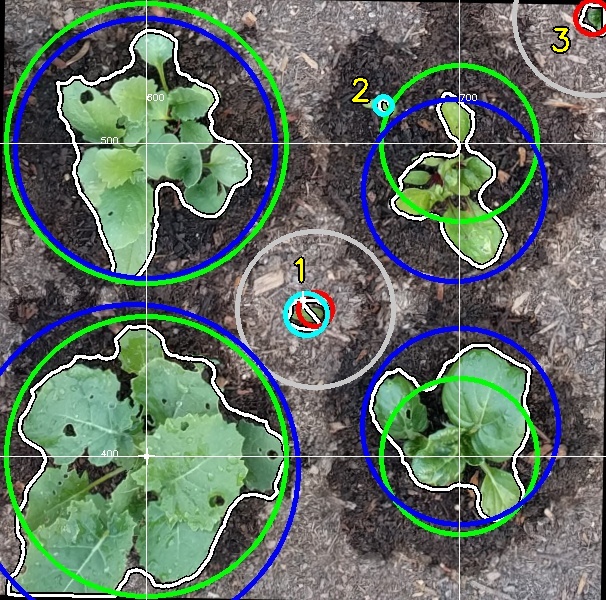
您现在可以指示机器去除标记为红色的杂草,并手动去除标记为青色的杂草
程序文本输出
7 plants detected in image.
4 known plants inputted.
Plants at the following machine coordinates ( X Y ) with R = radius are to be saved:
( 600 400 ) R = 45
( 600 500 ) R = 45
( 700 400 ) R = 25
( 700 500 ) R = 25
2 plants marked for removal.
Plants at the following machine coordinates ( X Y ) with R = radius are to be removed:
( 743 541 ) R = 6
( 654 447 ) R = 6
2 plants marked for safe removal.
Plants at the following machine coordinates ( X Y ) with R = radius were too close to the known plant to remove completely:
( 651 446 ) R = 7
( 676 512 ) R = 3
4 detected plants are known or have escaped removal.
Plants at the following machine coordinates ( X Y ) with R = radius have been saved:
( 700 410 ) R = 31
( 596 396 ) R = 53
( 698 485 ) R = 29
( 600 499 ) R = 42
故障排除:
无效的坐标转换值: [plant-detection] ERROR: Coordinate conversion calibration values invalid for provided image.
发生此错误的原因是相机的 z 轴高度与当前 z 高度不同。如果相机校准后相机旋转值发生显著变化,也会出现此错误。解决方法是移动到校准后的高度(通常为 0)或重新校准相机
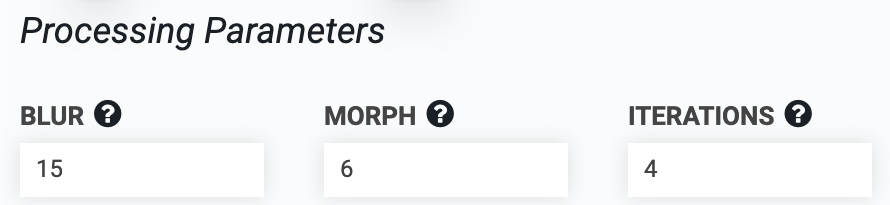
效果不佳:一旦用相机拍摄了图像,杂草检测软件就会对其进行处理。有几个高级处理参数(BLUR、MORPH和ITERATION)可以帮助您微调系统,使其在您的环境中发挥最佳性能。默认值在大多数情况下都适用,但如果您看到的结果不佳或在非标准环境中工作,您可以调整这些设置以进一步调整您的系统。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号