



















lighthouse定位系统入门教程-拼字母ABCD
说明
介绍如何实现7台无人机的拼字母ABCD
本文基于无人机多机套件主机测试
Crazyflie无人机集群套件,采购地址
仿真飞行:
- 进入脚本目录
roscd crazyswarm/scripts/
- 脚本代码
import numpy as np
from pycrazyswarm import Crazyswarm
def get_letter_A_coordinates():
coordinates = [
[0, 0, 1], [1, 3, 1], [2, 0, 1],
[0.5, 1.5, 1], [1.5, 1.5, 1],
[0, 0, 1], [1, 1.5, 1]
]
return np.array(coordinates)
def get_letter_B_coordinates():
coordinates = [
[0, 0, 1], [0, 3, 1], [1, 3, 1],
[1, 1.5, 1], [0.5, 1.5, 1],
[0, 1.5, 1], [1, 0, 1]
]
return np.array(coordinates)
def get_letter_C_coordinates():
coordinates = [
[1.0, 0, 1], [0, 0, 1], [0, 3, 1],
[1, 3, 1], [1, 2, 1],
[0, 2, 1], [0, 1, 1]
]
return np.array(coordinates)
def get_letter_D_coordinates():
coordinates = [
[0, 0, 1], [0, 3, 1], [1, 3, 1],
[1.5, 2, 1], [1, 0, 1],
[0, 1, 1], [1.5, 1, 1]
]
return np.array(coordinates)
def main():
swarm = Crazyswarm()
timeHelper = swarm.timeHelper
allcfs = swarm.allcfs
coords_A = get_letter_A_coordinates()
coords_B = get_letter_B_coordinates()
coords_C = get_letter_C_coordinates()
coords_D = get_letter_D_coordinates()
allcfs.takeoff(targetHeight=1.0, duration=2.0)
timeHelper.sleep(2.0)
for cf, coord in zip(allcfs.crazyflies, coords_A):
cf.goTo(goal=coord, yaw=0, duration=2.0)
timeHelper.sleep(5.0)
for cf, coord in zip(allcfs.crazyflies, coords_B):
cf.goTo(goal=coord, yaw=0, duration=2.0)
timeHelper.sleep(5.0)
for cf, coord in zip(allcfs.crazyflies, coords_C):
cf.goTo(goal=coord, yaw=0, duration=2.0)
timeHelper.sleep(5.0)
for cf, coord in zip(allcfs.crazyflies, coords_D):
cf.goTo(goal=coord, yaw=0, duration=2.0)
timeHelper.sleep(5.0)
allcfs.land(targetHeight=0.0, duration=2.0)
timeHelper.sleep(2.0)
if __name__ == "__main__":
main()
- 运行脚本
python3 letter.py --sim
- 启动后,无人机起飞0.5米,然后飞行字母A,B,C,D
真机飞行
1 2 3 4 5 6 7号无人机放置在基站测试区域中心
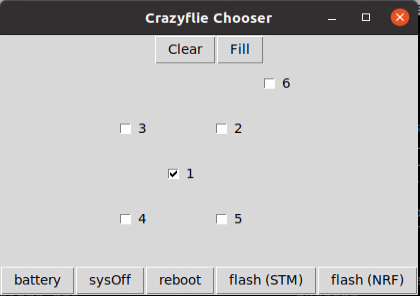
通过choose.py配置无人机,打开choose.py,勾选使用1号无人机
python3 chooser.py
- 终端下启动launch文件
roslaunch crazyswarm hover_swarm.launch
启动后,会弹出rviz,并显示对应的位置
新终端,启动脚本
python3 letter.py
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号