



















lighthouse定位系统入门教程-测试单台无人机起飞和降落
说明
- 介绍如何通过crazyswarm测试单台无人机起飞和降落
- 通过单无人机执行helloworld程序来测试集群是否安装正常
- 本测试基于无人机集群主机配置,如果是自己配置,请参考官方文档
- Crazyflie无人机集群套件,采购地址
仿真飞行
- 在真机测试之前,我们先做以下仿真
- 进入目录
roscd crazyswarm/scripts/
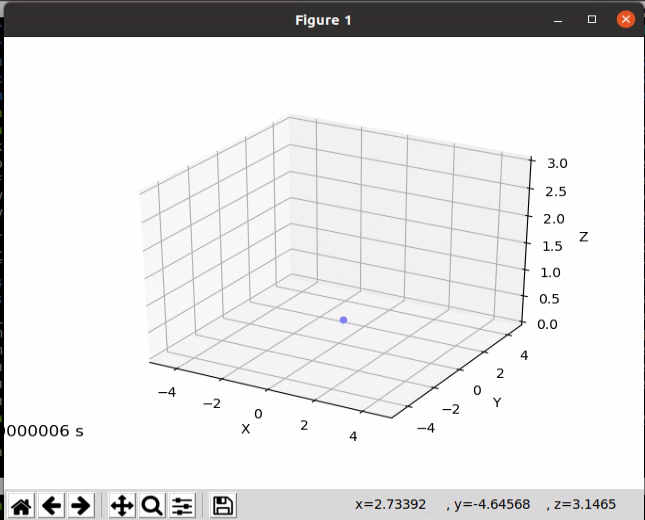
- 仿真运行,然后通过python3 启动 hello_world.py,加上一个 --sim参数
python3 hello_world.py --sim
- 执行效果如图:
真机测试
1号无人机放置在基站测试区域中心
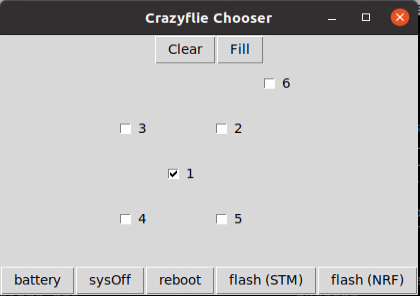
通过choose.py配置无人机,打开choose.py,勾选使用1号无人机
python3 chooser.py
- 效果图:
- 终端下启动launch文件
roslaunch crazyswarm hover_swarm.launch
- 启动后,会弹出rviz,并显示对应的位置
- 新终端,启动脚本
python3 hello_world.py
- 无人机会自动起飞
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号