



















ROS1与Interbotix系列机械臂教程-真机-手柄控制
文章说明
- 本教程主要介绍用手柄控制机械臂的流程
操作步骤
- 启动手柄控制
$ roslaunch interbotix_xsarm_joy xsarm_joy.launch robot_model:=wx250s
- 启动文件的具体参数说明
| 参数名称 | 描述 | 默认值 |
|---|---|---|
| robot_model | Interbotix机械臂的型号 | "" |
| robot_name | 机器人名称 | $(arg robot_model) |
| base_link_frame | 机械臂的base_link帧,默认为base_link;若将机械臂添加到带有已有base_link帧的底盘,则可以进行对应的修改 | base_link |
| use_rviz | 是否打开rviz | true |
| mode_configs | 'mode config'yaml文件的路径 | refer to xsarm_control.launch |
| threshold | 手柄灵敏度,范围在0到1之间;数值越大代表灵敏度越低 | 0.75 |
| controller | 手柄型号:(“ps3”、“ps4”或“xbox360”) | ps4 |
| launch_driver | 启动默认的xsarm_control.launch;文件,默认为true;若想另外单独运行则设置为false | true |
| use_sim | 若为true,则启动Dynamixel的仿真节点,使用rviz可视化机械臂;若为false,则相反 | false |
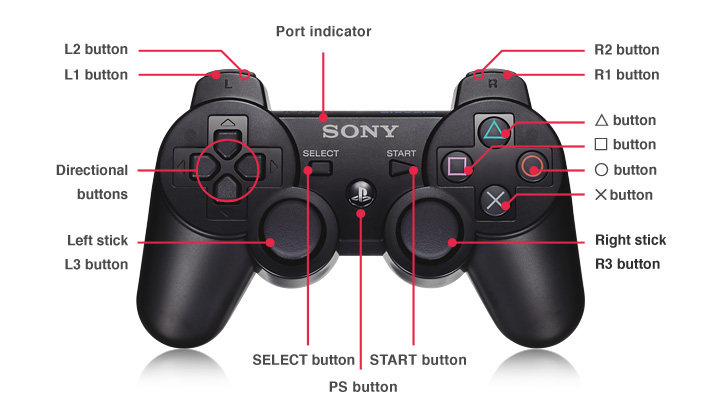
- 以下为ps手柄的键位布局图,xbox360手柄的键位名称则略有不同,不过按钮位置基本相同
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号