



















ROS2版Turbot3-Multi仿真教程-单机边建图边导航
说明
- 介绍如何实现通过单机指定命名空间实现边边建图边导航
- 环境: ubuntu22.04 + ros2 humble
- 实现机型:ros2版turbot3-multi仿真套件
步骤:
- 新开终端, 启动gazebo
./multi_scripts/single_gazebo.sh
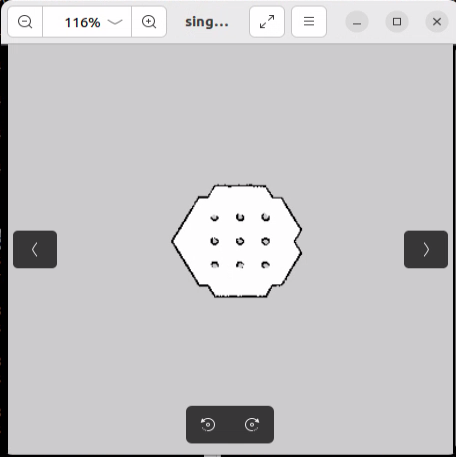
- 效果如图:

- 新终端,启动导航
./multi_scripts/single_nav.sh
- 新终端,启动建图
./multi_scripts/single_slam.sh slam_gmapping
- 说明:默认是使用slam_gmapping 也可以使用slam_cartographer或slam_toolbox
- 新终端,启动rviz
./multi_scripts/single_rviz_slam.sh
- 效果如图:

- 通过点击 2D Goal Pose再地图上指定目标点,开始导航,并同时实现建图

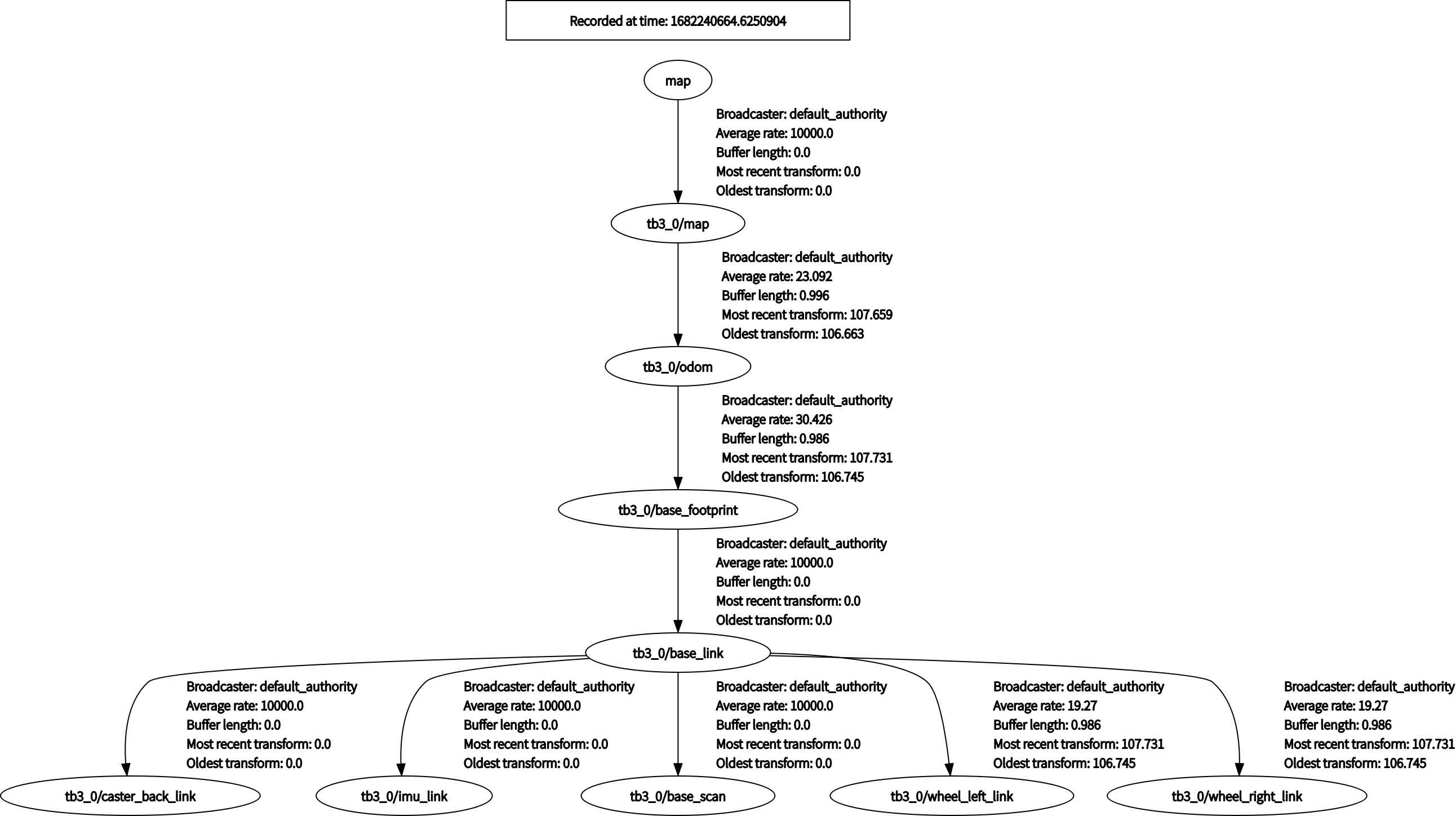
- 查看完整的TF图
- 也可以通过键盘控制小车移动建图
- 新终端,启动键盘控制
./multi_scripts/single_key.sh
- 控制小车移动实现建图
- 保存地图:
./multi_scripts/single_save_map.sh
- 地图自动保存在~/ros2_tb3_multi_ws/src/turtlebot3_multi/map目录下,名为single.yaml和single.pgm
- 查看地图
eog ~/ros2_tb3_multi_ws/src/turtlebot3_multi/map/single.pgm
- 效果图:
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号