



















PythonRobotics机器人算法库-三次样条规划
说明:
介绍三次样条规划
步骤:
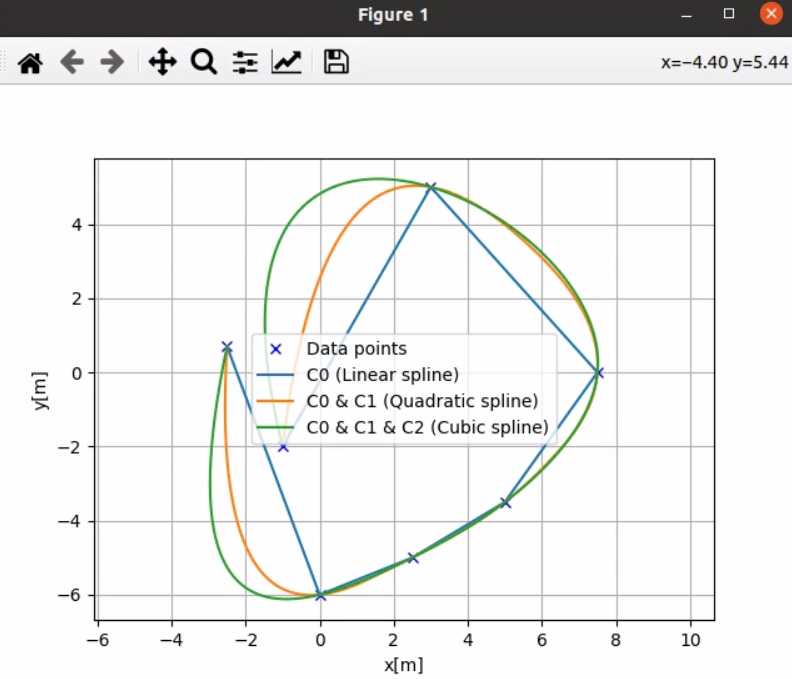
样条曲线连续性
样条曲线的平滑度取决于使用哪种样条模型。
样条曲线的平滑度表示为C0 C1, 等等。
该表示表示曲线的连续性。例如,对于二维空间中的样条曲线:
C0位置是否连续
C1切向量是连续的
C2曲率向量是连续的
如下图所示:
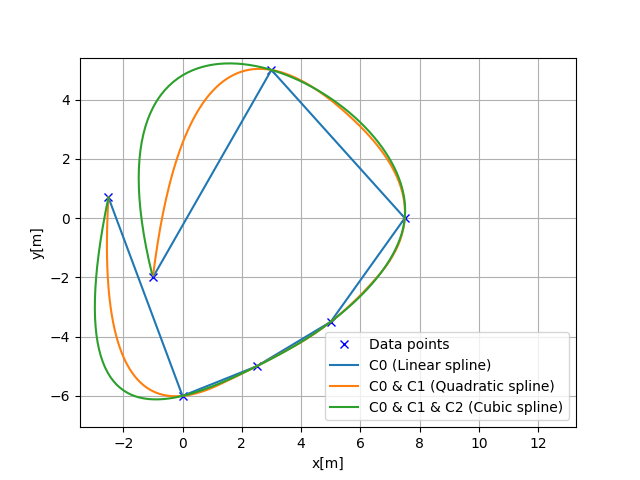
- 三次样条可以生成一条曲线,C0,C1,C2
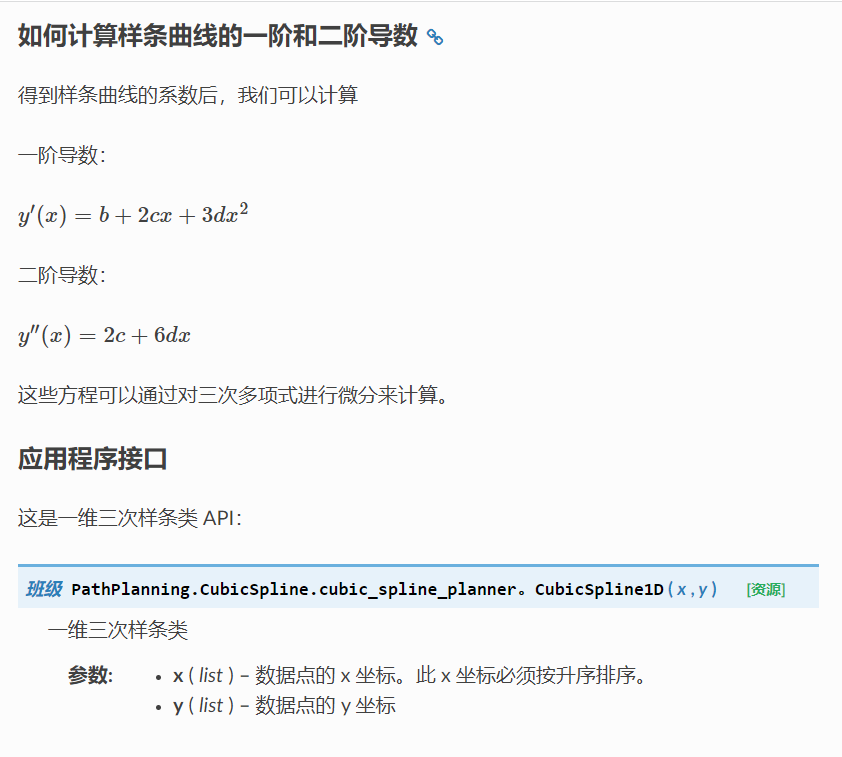
一维三次样条
- 三次样条插值是在给定多个数据点的情况下,在多个数据点之间进行平滑插值的方法,如下图所示。
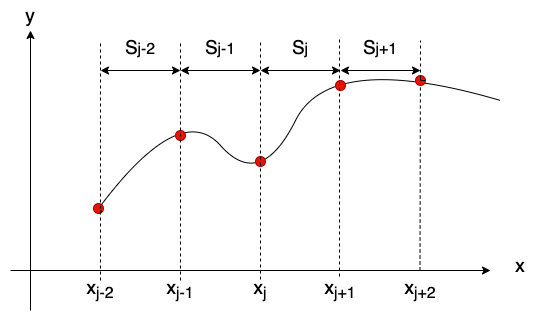
它在数据点之间的每个间隔之间进行分隔。
每个区间部分由每个三次多项式近似。
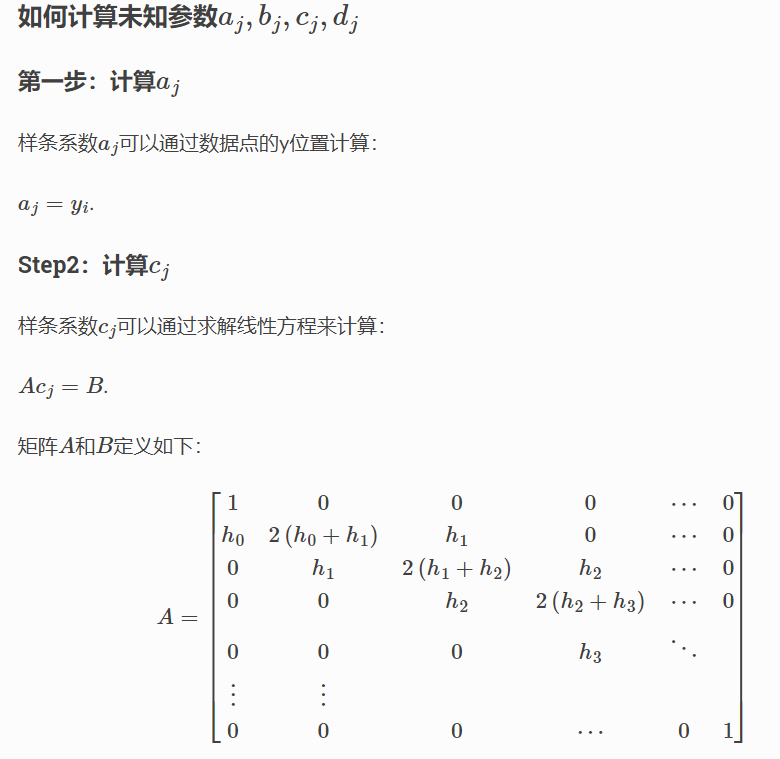
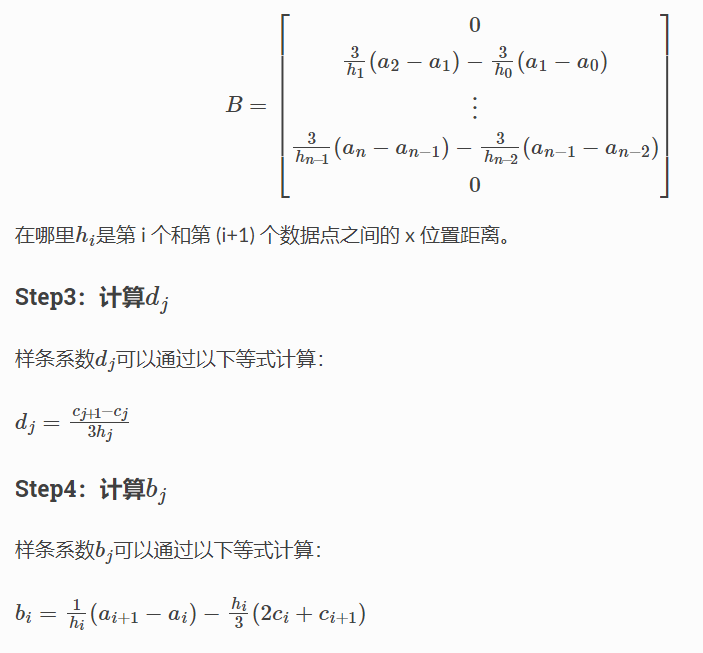
三次样条使用三次多项式方程进行插值:
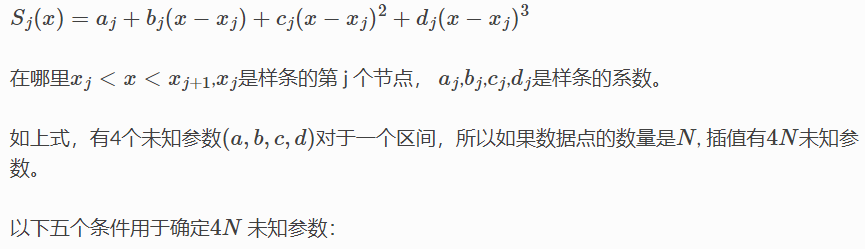
约束一:终端约束
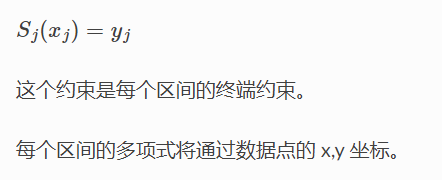
约束2:点连续约束
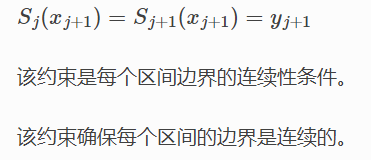
约束3:切向量连续约束
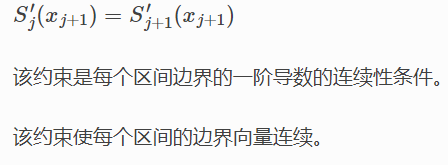
约束4:曲率连续约束
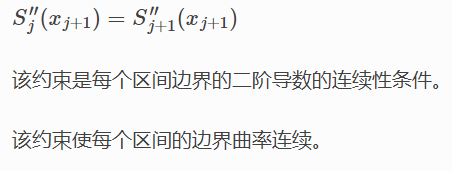
约束 5:终端曲率约束

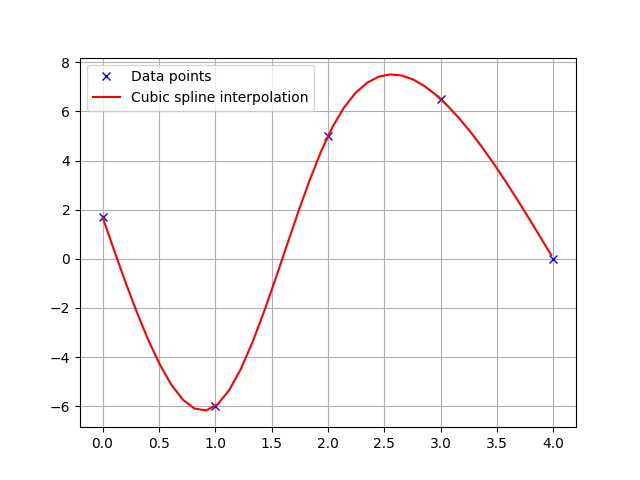
- 例子,插入一维数据点
import numpy as np
import matplotlib.pyplot as plt
x = np.arange(5)
y = [1.7, -6, 5, 6.5, 0.0]
sp = CubicSpline1D(x, y)
xi = np.linspace(0.0, 5.0)
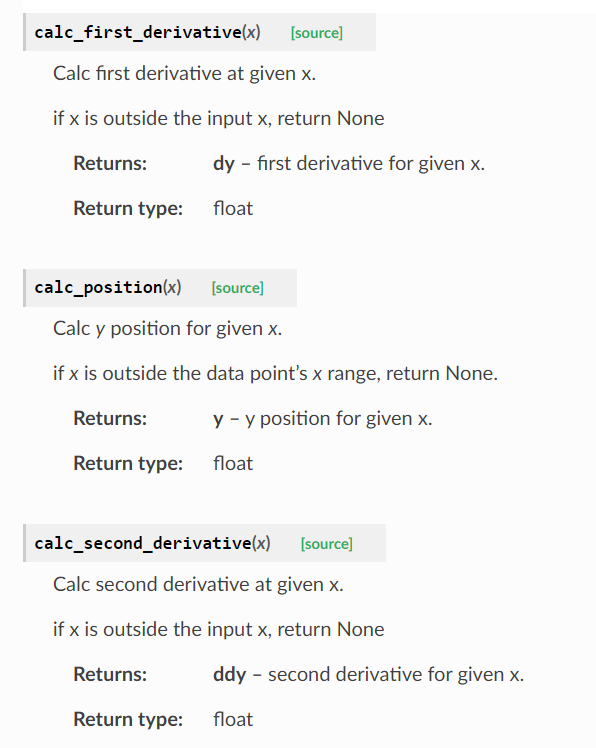
yi = [sp.calc_position(x) for x in xi]
plt.plot(x, y, "xb", label="Data points")
plt.plot(xi, yi , "r", label="Cubic spline interpolation")
plt.grid(True)
plt.legend()
plt.show()
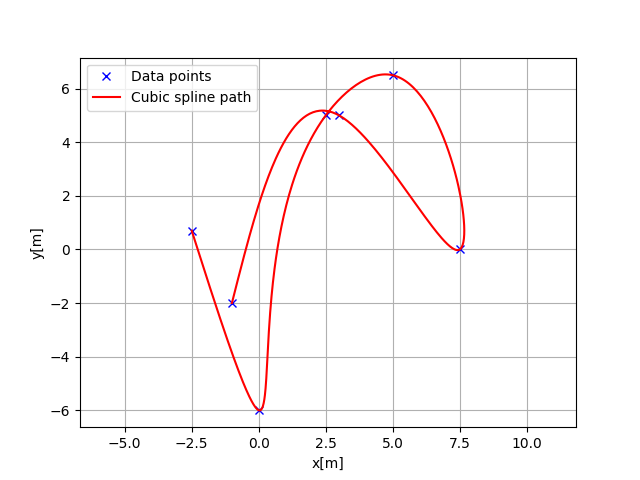
- 二维三次样条
- 例如,可以对二维数据点进行插值
import matplotlib.pyplot as plt
x = [-2.5, 0.0, 2.5, 5.0, 7.5, 3.0, -1.0]
y = [0.7, -6, 5, 6.5, 0.0, 5.0, -2.0]
ds = 0.1 # [m] distance of each interpolated points
sp = CubicSpline2D(x, y)
s = np.arange(0, sp.s[-1], ds)
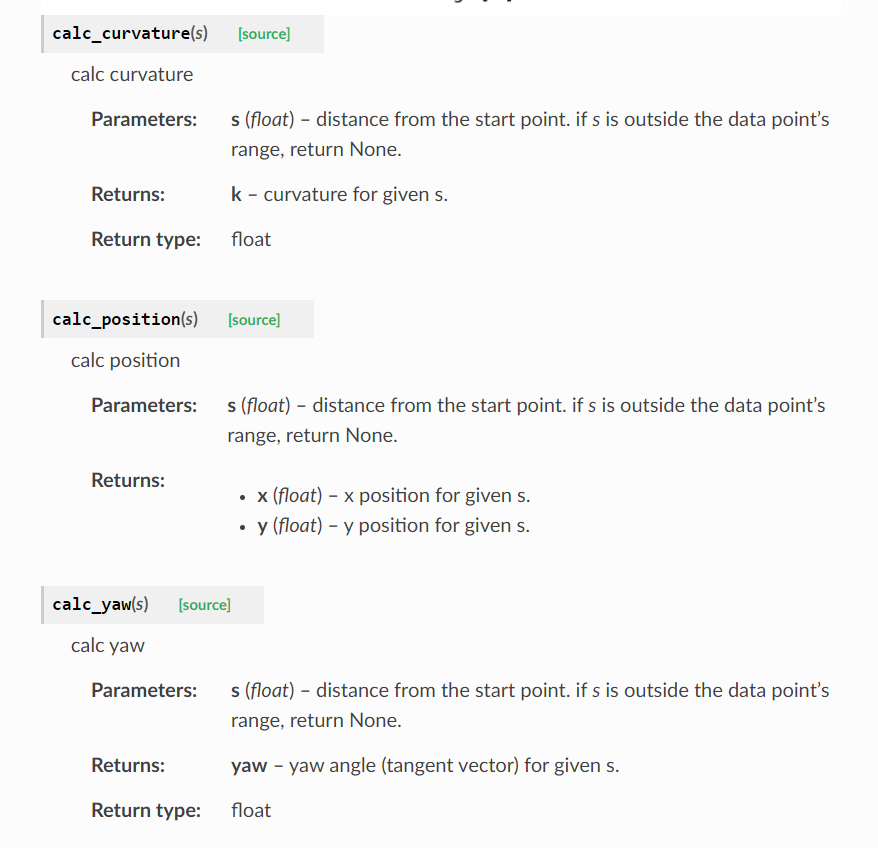
rx, ry, ryaw, rk = [], [], [], []
for i_s in s:
ix, iy = sp.calc_position(i_s)
rx.append(ix)
ry.append(iy)
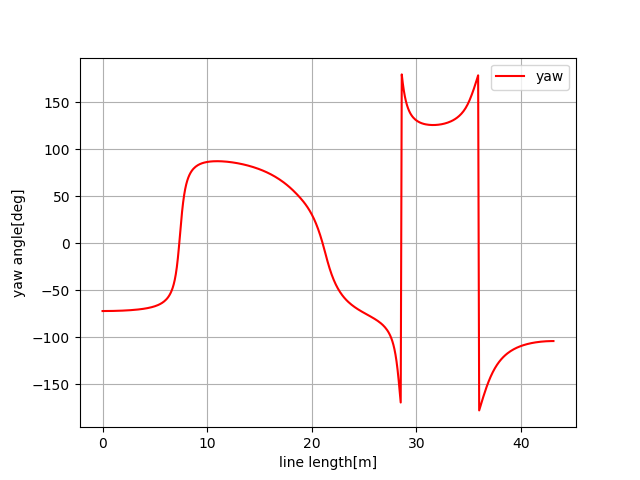
ryaw.append(sp.calc_yaw(i_s))
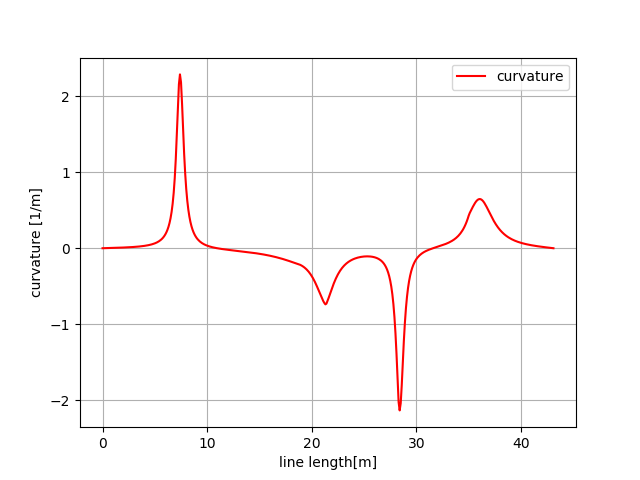
rk.append(sp.calc_curvature(i_s))
plt.subplots(1)
plt.plot(x, y, "xb", label="Data points")
plt.plot(rx, ry, "-r", label="Cubic spline path")
plt.grid(True)
plt.axis("equal")
plt.xlabel("x[m]")
plt.ylabel("y[m]")
plt.legend()
plt.show()
plt.subplots(1)
plt.plot(s, [np.rad2deg(iyaw) for iyaw in ryaw], "-r", label="yaw")
plt.grid(True)
plt.legend()
plt.xlabel("line length[m]")
plt.ylabel("yaw angle[deg]")
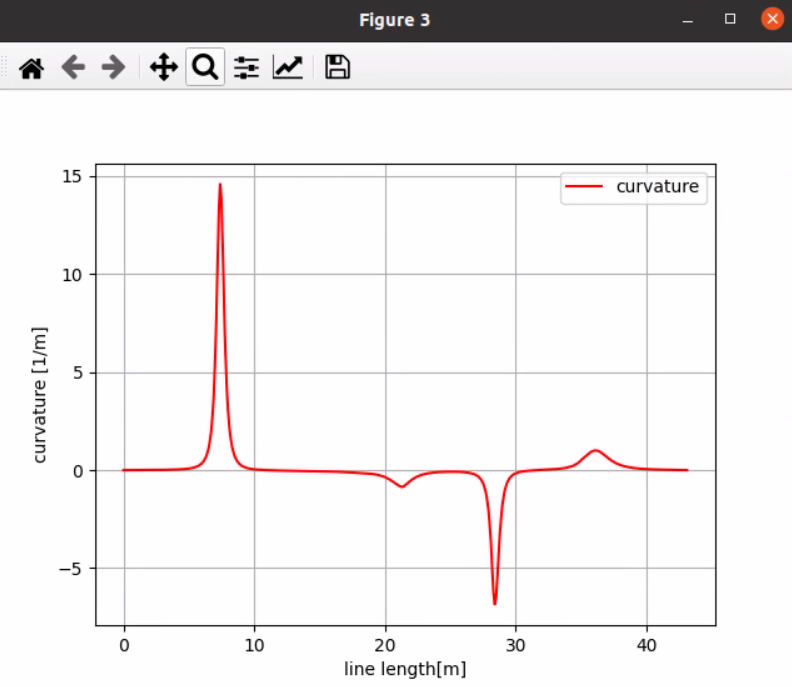
plt.subplots(1)
plt.plot(s, rk, "-r", label="curvature")
plt.grid(True)
plt.legend()
plt.xlabel("line length[m]")
plt.ylabel("curvature [1/m]")
进入目录PythonRobotics/PathPlanning/CubicSpline
执行文件
python3 cubic_spline_planner.py
python3 spline_continuity.py
- 结果如下
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号