



















ROS2与Open-RMF仿真教程-Office World(21.09版)
ROS2与Open-RMF仿真教程-Office World(21.09版)
说明:
- 介绍如何完成Office World的示例
- 基于APT版本21.09版
启动步骤:
- 启动Office World仿真
ros2 launch rmf_demos_gz office.launch.xml
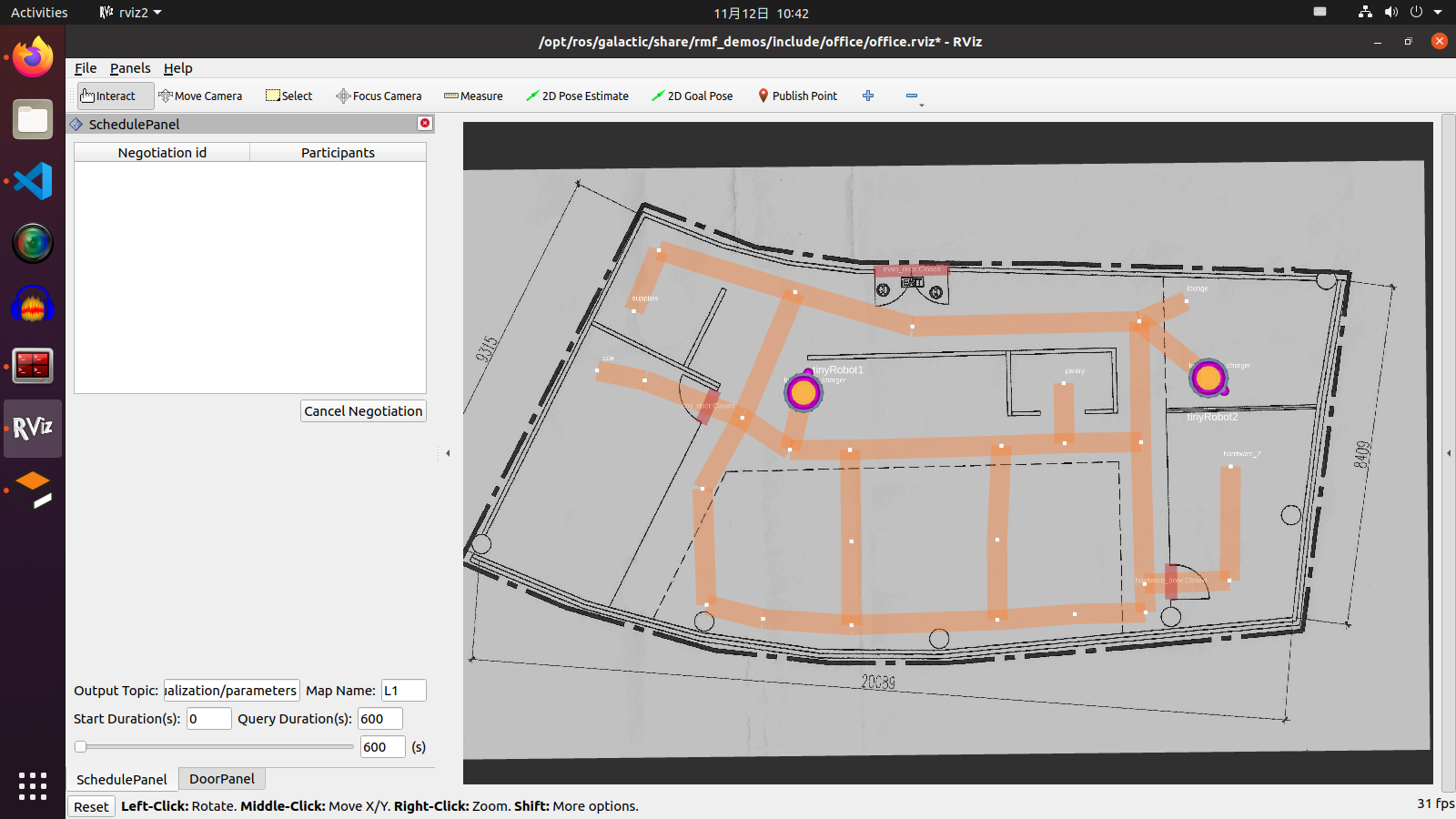
- 此场景为办公室应用, 含1个车队, 2个机器人
- rviz效果图:
- gazebo效果图:

命令行发布任务:
- 发布delivery任务
ros2 run rmf_demos_tasks dispatch_delivery -p pantry -pd coke_dispenser -d hardware_2 -di coke_ingestor --use_sim_time
- 可以通过
ros2 run rmf_demos_tasks dispatch_delivery -h查看介绍 - P为任务取物点,pd为可乐分配器, d为任务投放点, di为可乐取物器
- 仿真任务加上--use_sim_time
- 效果图:

- 目前还没找到coke_dispenser和coke_ingestor控制方法
- 发布loop任务
ros2 run rmf_demos_tasks dispatch_loop -s pantry -f supplies -n 3 --use_sim_time
- 可以通过
ros2 run rmf_demos_tasks dispatch_loop -h查看介绍 - s为开始点, -f为结束点, -n为循环次数
- 仿真任务加上--use_sim_time
- 效果图:

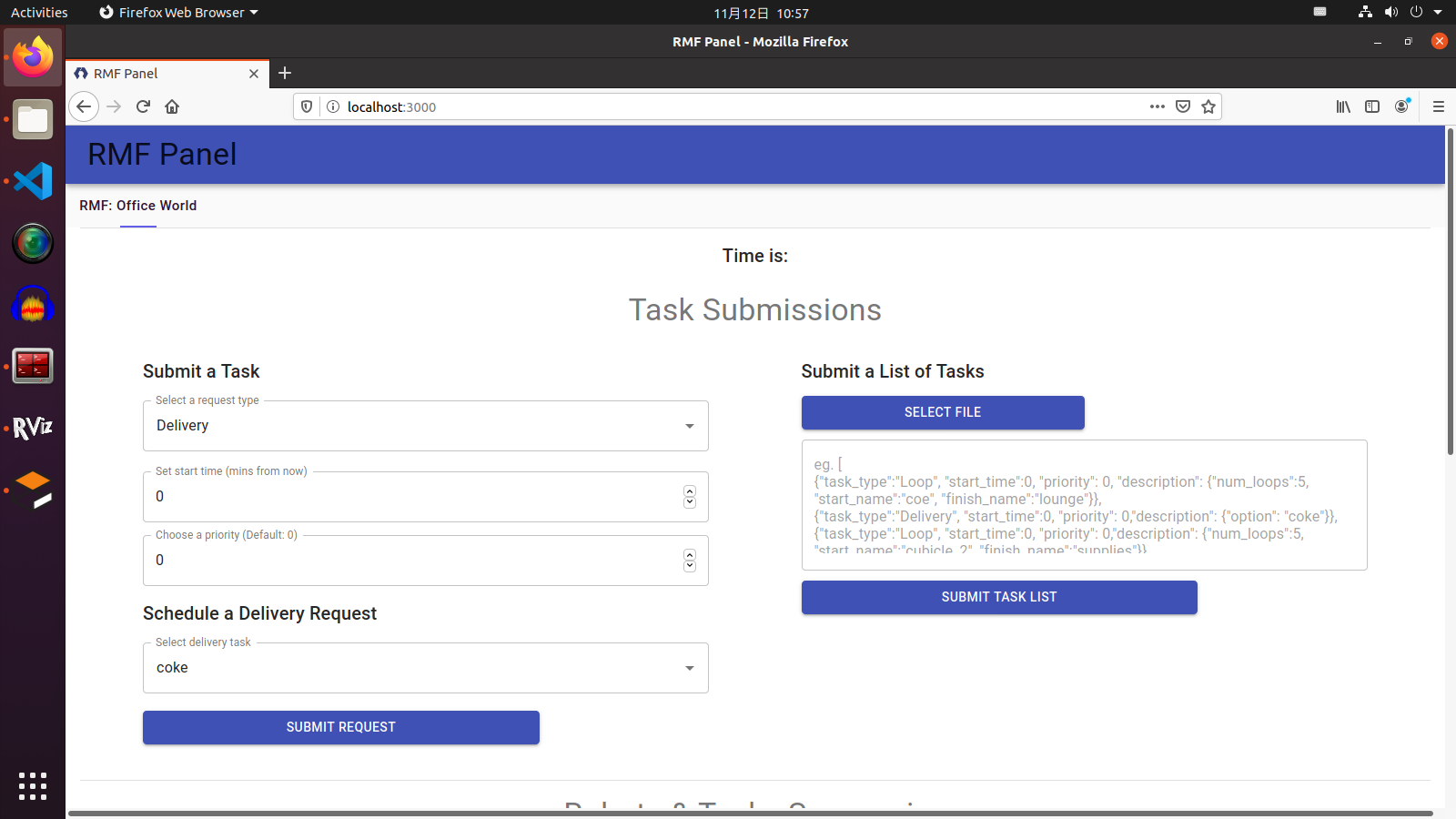
页面发布任务:
- 启动panel-js
- 进入编译到的rmf_panel目录,假设你根据之前安装教程,目录在~/ros2_rmf_ws/rmf-panel-js/
cd rmf_panel
python3 -m http.server 3000
- 效果如图:
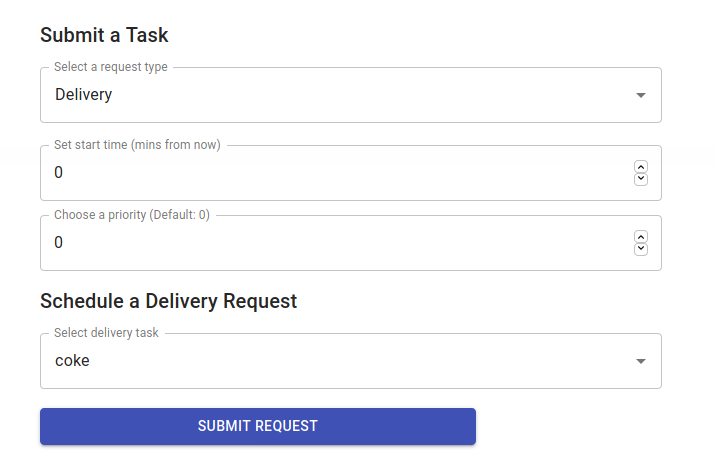
- 发布delivery任务
- 1.可以通过左边栏的选择实现, 再提交
- 效果图 :
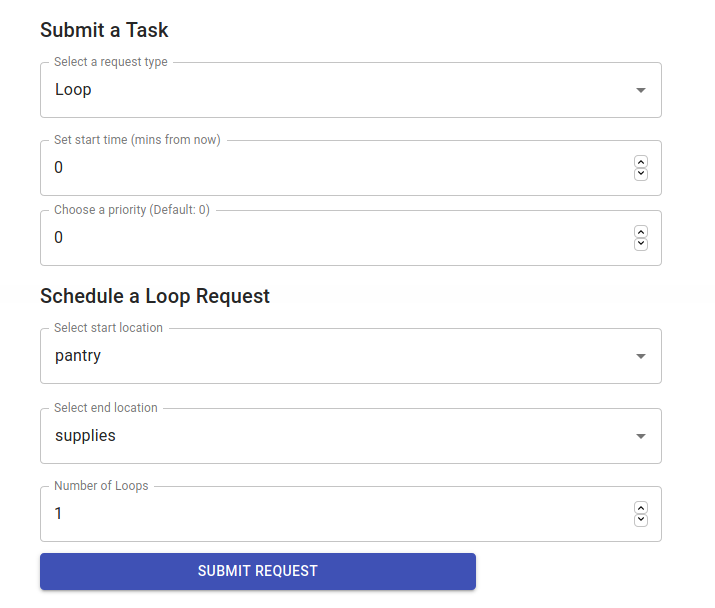
- 发布loop任务
- 1.可以通过左边栏的选择实现, 再提交
- 效果图:
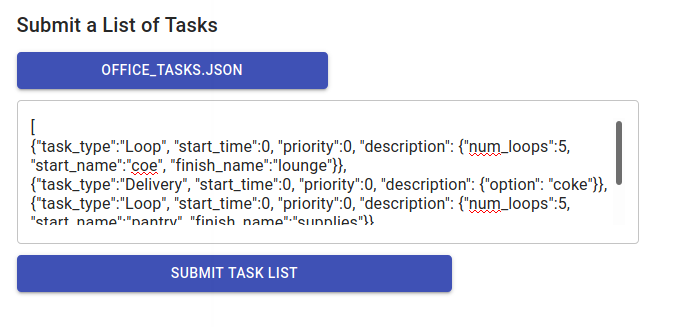
- 2.可以导入office_tasks.json, 再提交
- office_tasks.json位于~/ros2_rmf_ws/src/demonstrations/rmf_demos_panel/task_lists下
- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号