



















ROS2与OpenManipulator机械臂入门教程-键盘控制
ROS2与OpenManipulator机械臂入门教程-键盘控制
说明:
- 介绍使用键盘来控制OpenManipulator机械臂
操作步骤
- 建议启动机械臂前请将机械臂手动设置以下姿势,以避免启动后出现无法控制的问题
- 启动机械臂
$ ros2 launch open_manipulator_x_controller open_manipulator_x_controller.launch.py usb_port:=/dev/ttyACM0
- 启动键盘控制
$ ros2 run open_manipulator_x_teleop teleop_keyboard
Control Your OpenManipulator!
---------------------------
Task Space Control:
(Forward, X+)
W Q (Upward, Z+)
(Left, Y+) A D (Right, Y-) Z (Downward, Z-)
X
(Backward, X-)
Joint Space Control:
- Joint1 : Increase (Y), Decrease (H)
- Joint2 : Increase (U), Decrease (J)
- Joint3 : Increase (I), Decrease (K)
- Joint4 : Increase (O), Decrease (L)
- Gripper: Increase (F), Decrease (G) | Fully Open (V), Fully Close (B)
INIT : (1)
HOME : (2)
CTRL-C to quit
Joint Angle(Rad): [0.081, 0.184, 0.212, 1.143, 0.010]
Kinematics Pose(Pose X, Y, Z | Orientation W, X, Y, Z): 0.000, 0.000, 0.000 | 0.000, 0.000, 0.000, 0.000
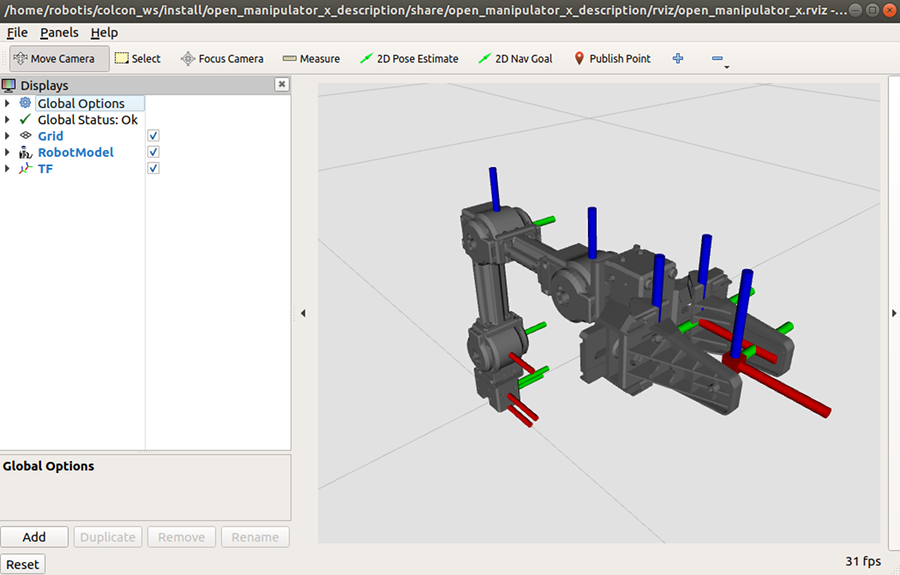
- 启动可视化界面
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz.launch.py
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号