



















ros2与传感器-整合RS-lidar-16线雷达(速腾)
ros2与传感器-整合RS-lidar-16线雷达
说明:
- 介绍如何在ros2下使用RS-lidar-16线雷达
- 环境: ubuntu20.04 + ros2 galactic
- 具体产品,点击淘宝地址
步骤:
- 首先将激光雷达速腾RS-lidar-16与电脑相连
- RS-lidar-16上电(12v)
- RS-lidar-16官方默认的ip是192.168.1.200
- 通过以太网网口连接电脑
- 新增网络rslidar-16,以太网->ipv4设置->方法:手动,更改配置
address :192.168.1.102
netmask: 255.255.255.0
gateway: 192.168.1.1
然后打开浏览器输入192.168.1.200可以看到激光雷达的配置文件
安装相关包
sudo apt-get install libboost-dev libpcap-dev libpcl-dev libeigen3-dev
- 安装ros工程包
cd ~/rslidar_ws/src
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk
cd ~/rslidar_ws/
colcon build --symlink-install
- 配置雷达类型参数,其他参数配置说明,参考
- 修改rslidar_sdk/config/config.yaml
- 配置lidar_type为RS16
lidar:
- driver:
lidar_type: RS16 #LiDAR type - RS16, RS32, RSBP, RS128, RS128_40, RS80, RSM1, RSHELIOS
frame_id: /rslidar #Frame id of message
- 测试
. ~/rslidar_ws/install/local_setup.bash
ros2 launch rslidar_sdk start.py
- 查看点云话题
ros2 topic echo /rslidar_points
- 效果如下:
---
header:
stamp:
sec: 1664437253
nanosec: 820659161
frame_id: /rslidar
height: 16
width: 1992
fields:
- name: x
offset: 0
datatype: 7
count: 1
- name: y
offset: 4
datatype: 7
count: 1
- name: z
offset: 8
datatype: 7
count: 1
- name: intensity
offset: 16
datatype: 7
count: 1
is_bigendian: false
point_step: 32
row_step: 63744
data:
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 128
- 63
- 0
- 0
- 0
- 0
- 66
- 127
- 0
- 0
- 32
- 106
- 0
- 8
- 66
- 127
- 0
- 0
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 128
- 63
- 0
- 0
- 0
- 0
- 0
- 0
- 0
- 0
- 112
- 28
- 177
- 123
- 184
- 85
- 0
- 0
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 128
- 63
- 0
- 0
- 0
- 0
- 65
- 127
- 0
- 0
- 0
- 59
- 181
- 0
- 40
- 228
- 0
- 31
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 192
- 127
- 0
- 0
- 128
- 63
- 0
- 0
- 0
- 0
- 65
- 127
- 0
- 0
- 6
- 1
- 70
- 6
- 1
- 70
- 4
- 1
- '...'
is_dense: false
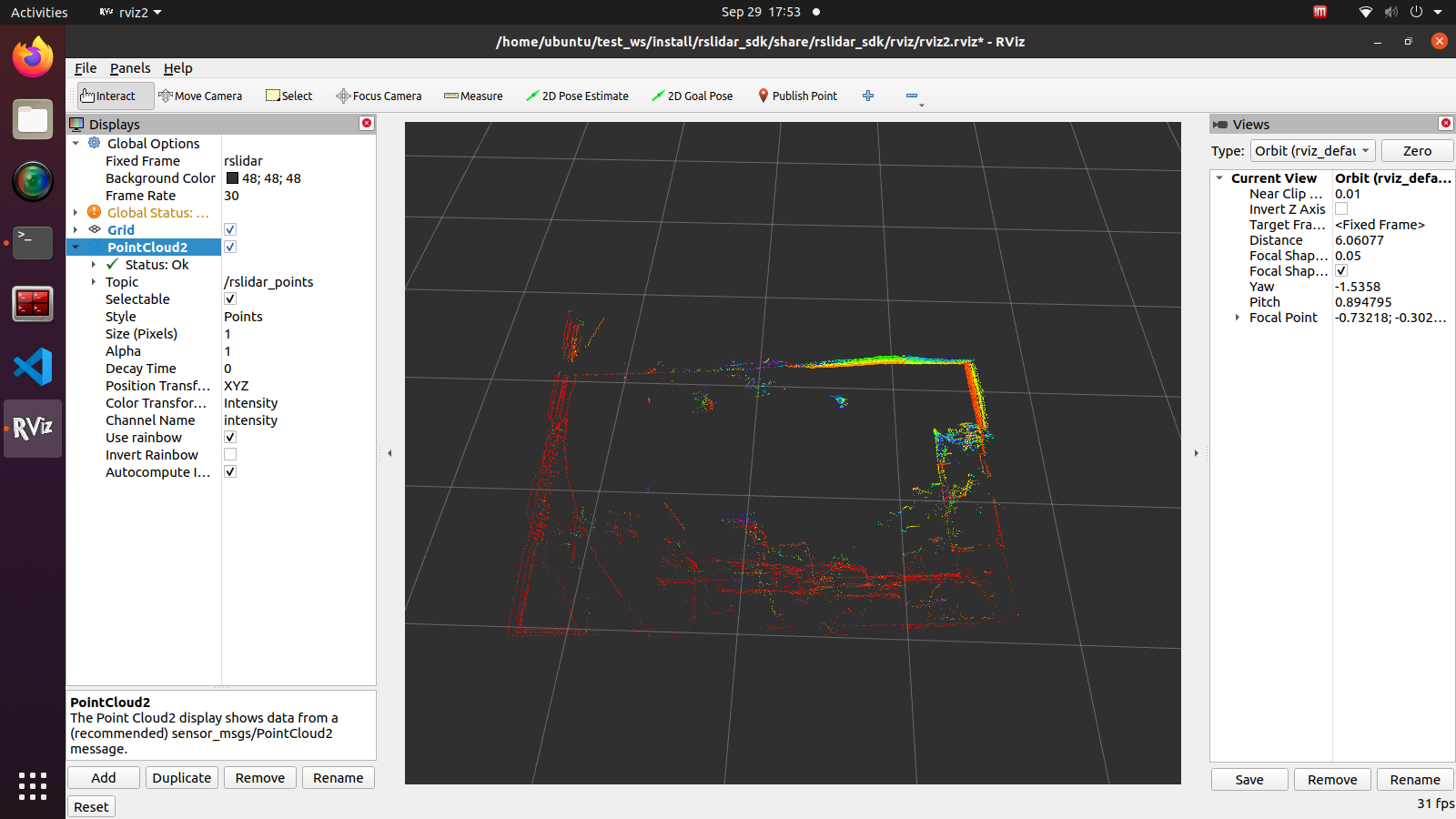
RIVZ查看点云
- 效果图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号