



















ROS命令管理器-部署-快速安装ubuntu20.04系统并优化(桌面版)
ROS命令管理器-优化系统环境各类源实现加速
说明:
- 利用RCM解决各种更新慢的问题
虚拟机安装ubuntu20.04:
- 快速入门推荐使用我们配套的虚拟机镜像
- 下载ubuntu20.04虚拟机镜像
链接:https://pan.baidu.com/s/1NgqicR8dBDMaZatqUnanLg?pwd=3q2r 提取码:3q2r
实体机安装ubuntu20.04:
- 下载ubuntu20.04镜像
链接:https://pan.baidu.com/s/1sG27cBbzWi-nTVjyYBfcVg?pwd=5z78 提取码:5z78
安装ROS命令管理器
优化说明:
- 首类问题:各种源访问不顺畅
- ubuntu下的APT源,ROS1源,ROS2源,Python源,Docker源等都是国外地址,国内的网络问题对这些源的地址总是访问不顺畅
- 问题解决:目前主要解决方法是替换为国内的源,这样保证获取更好的更新,下载和安装速度。
- 第二类问题:rosdep更新出错问题
- 问题解决:更新rosdep的安装源为清华源
- 第三类问题:是国内对于*.github.com等网站的访问异常问题
- 问题解决:这类问题可通过使用代理实现问题,比如地址前添加https://ghproxy.com
- 通过替换和代理后,大部分的ubuntu安装和更新问题就可以解决
优化系统APT源:
- 打开commands,点击common目录,导入update_system_mirros.json
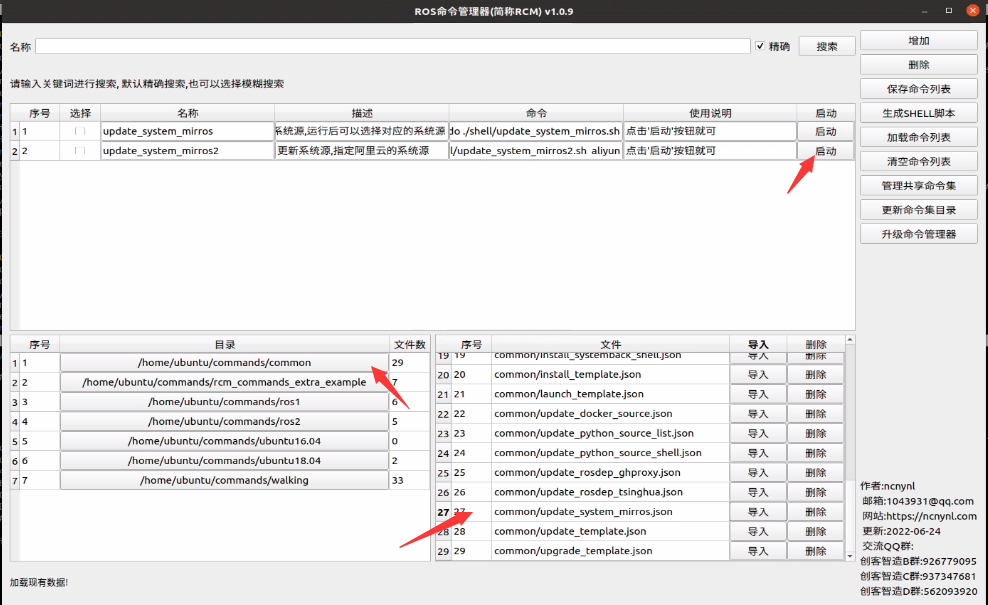
- 点击其中一条执行命令后的
启动,完成APT源更新
优化系统rosdep源:
- 打开commands,点击common目录,导入update_rosdep_tsinghua.json

- 点击其中一条执行命令后的
启动,完成rosdep源更新
优化Python源:
- 打开commands,点击common目录,导入update_python_source_shell.json

- 点击命令后的
启动,完成Python源更新
优化ROS1源:
- 打开commands,点击ros1目录,导入update_ros1_source.json

- 点击命令后的
启动,完成ROS1源更新
优化ROS2源:
- 打开commands,点击ros2目录,导入update_ros2_source.json

- 点击命令后的
启动,完成ROS2源更新
优化docker源:
- 打开commands,点击common目录,导入update_docker_source.json

- 点击命令后的
启动,完成docker源更新
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号