



















Turbot3-ARM入门教程-Moveit!控制机械臂
说明
- 本教程介绍如何在Turbot3-ARM机器人上Moveit!控制机械臂
操作步骤
- [Remote PC] 运行roscore
$ roscore
- [TurBot3 SBC] 启动机器人
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
- [Remote PC] 启动机械臂节点
$ roslaunch turtlebot3_manipulation_bringup turtlebot3_manipulation_bringup.launch
- [Remote PC] 启动move_group节点
$ roslaunch turtlebot3_manipulation_moveit_config move_group.launch
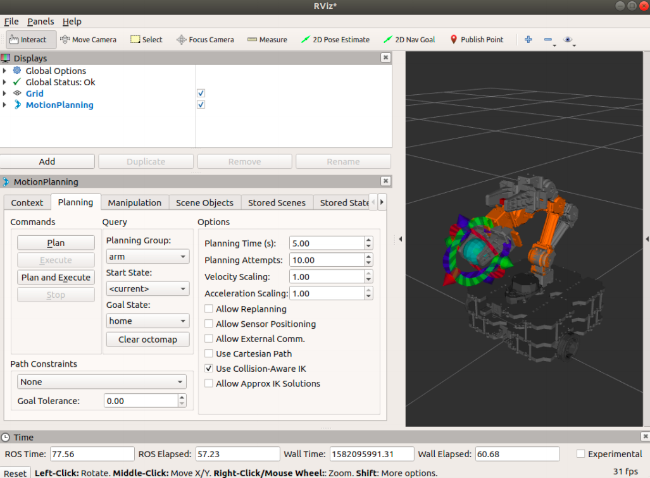
- [Remote PC] 启动Moveit!
$ roslaunch turtlebot3_manipulation_moveit_config moveit_rviz.launch
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号