



















walking机器人仿真教程-应用-设置限速区实现仓库里指定区域速度限制
walking机器人仿真教程-应用-设置限速区实现仓库里指定区域速度限制
说明:
- 这个应用模拟在仓库里设置限速区域,实现速度限制.
相关设备:
- walking机器人套件:采购地址
步骤:
- 加载gazebo环境
. /usr/share/gazebo/setup.bash
- 启动仿真
ros2 launch walking_application warehouse_world_speed_limit_zones.launch.py
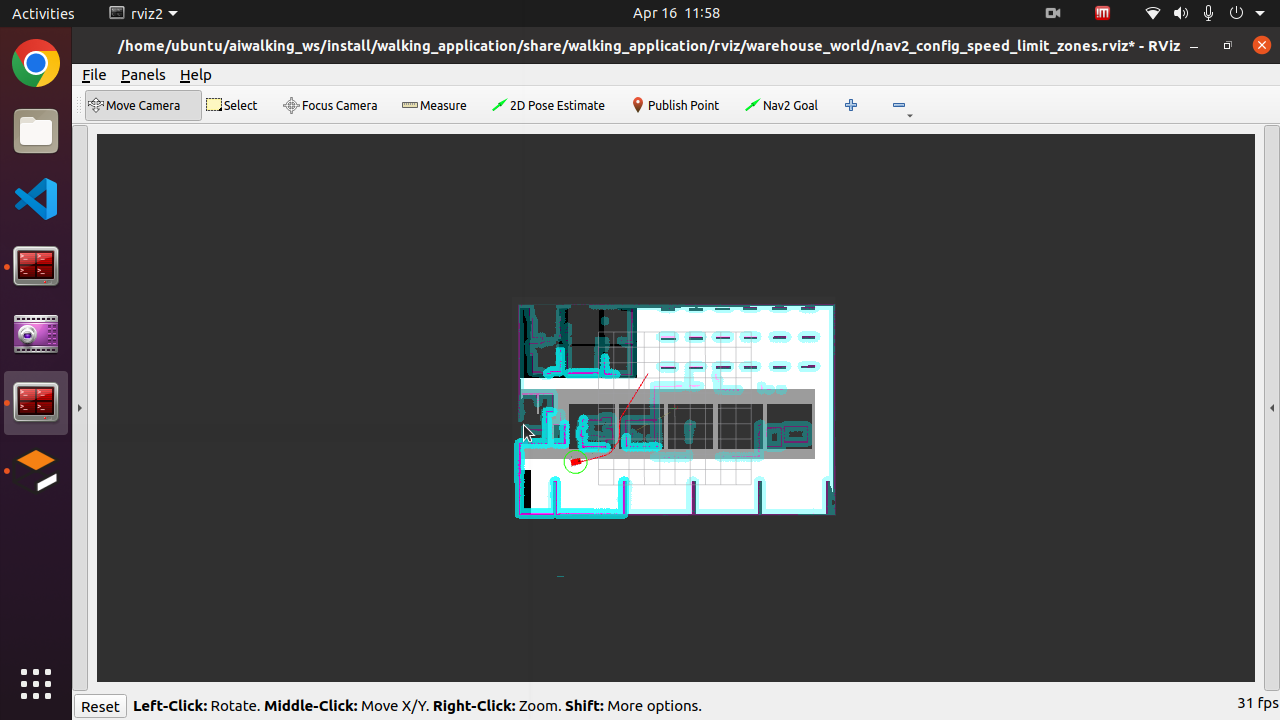
- 效果图:

- 初始化起点
ros2 topic pub -1 /initialpose geometry_msgs/PoseWithCovarianceStamped '{ header: {stamp: {sec: 0, nanosec: 0}, frame_id: "map"}, pose: { pose: {position: {x: -3.7, y: 9.0, z: 0.0}, orientation: {w: 1.0}}, } }'
- 再通过rviz上选择目标点, 这个目标点要跨过限速区,实现在深灰色的限速区内减缓速度,出了限速区恢复正常速度.
- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号