



















ROS2与Gazebo11入门教程-代码自检
说明:
- 介绍代码自检实用程序
概述
- Gazebo 8中引入了新的代码自检实用程序。这项新的服务使客户端可以接收具有某些请求变量值的更新消息。代码自检服务可用于调试Gazebo、插件甚至独立应用程序中的内部变量的状态
注册项(Registering items)
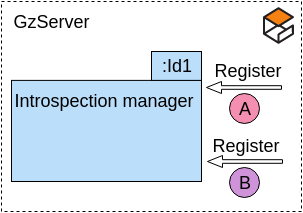
使用代码自检服务时涉及两个步骤:注册和订阅。注册阶段会将某个特定变量注册到自检服务中。通过注册变量,可以使该变量可以进行自检。请注意,注册变量并不会触发任何更新消息的发布,也不会导致系统中的相关开销。
自检管理器是提供注册变量(称为“项”)功能的实体。GzServer有一个正在运行的自检管理器实例,而且已经预先注册了一些项,这些项使我们可以自检仿真时间或者模型和链接的位置、速度和加速度,以及其他项。
- 通过查看Gazebo源代码中的Util/IntrospectionManager类,可以了解有关自检管理器及其API的更多信息
订阅接收注册项的更新消息
- 一旦注册了所有潜在的可自检项,客户端就需要通知自检服务它对一个或多个项感兴趣。因此,客户端需要用自检管理器ID和感兴趣项的列表创建一个过滤器。
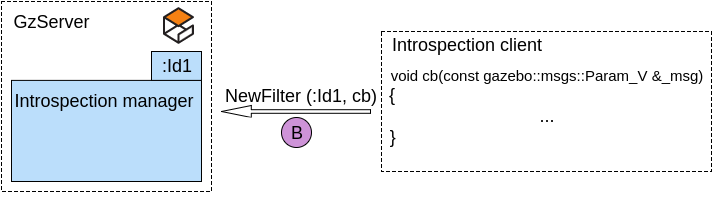
- 这个操作会为自检管理器与客户端之间的通信创建一个专用通道。 该通道包含在过滤器中指定的变量值的消息。如果有一个或多个变量未注册,则客户端不会接收这些变量。
示例:对插件进行自检
在本示例中,我们将会创建一个非常简单的仿真世界插件,该插件在每次仿真世界更新时都会对一个整数变量进行自增。这个插件有趣的部分是我们将会让计数器成为可自检的。我们将会编写一个名为watcher的可执行文件,该可执行文件将会显示仿真时间和自定义计数器的值
编译插件和watcher可执行文件
创建一个用于存储本教程中所有文件的新目录,命令为:
mkdir ~/gazebo_introspection_tutorial
cd ~/gazebo_introspection_tutorial
- 下载该插件和watcher程序的代码以及CMakeLists.txt文件:
wget http://github.com/osrf/gazebo_tutorials/raw/master/introspection/files/introspectable_plugin.cc
wget http://github.com/osrf/gazebo_tutorials/raw/master/introspection/files/watcher.cc
wget https://github.com/osrf/gazebo_tutorials/raw/master/introspection/files/CMakeLists.txt
- 现在来编译该代码:
mkdir build && cd build
cmake ..
make
- 这样就应该有了一个libintrospectable_plugin.so插件和一个watcher可执行文件,从而为测试做好了准备。
运行代码
- 下载一个仿真世界文件,该世界文件会加载上面这个仿真世界插件,命令为:
cd ~/gazebo_introspection_tutorial
wget https://github.com/osrf/gazebo_tutorials/raw/master/introspection/files/empty.world
- 启动Gazebo,命令为:
cd ~/gazebo_introspection_tutorial/build
GAZEBO_PLUGIN_PATH=`pwd` gazebo --verbose ../empty.world
- 请注意,这里用build目录的路径对GAZEBO_PLUGIN_PATH环境变量进行了设置,以帮助Gazebo查找到该插件。Gazebo准备就绪后,在一个新的终端中执行以下命令:
cd ~/gazebo_introspection_tutorial/build
./watcher
- 这样就应该可以看到类似于下面的输出:
param {
name: "data://world/default?p=time/sim_time"
value {
type: TIME
time_value {
sec: 12
nsec: 616000000
}
}
}
param {
name: "data://my_plugin/counter"
value {
type: INT32
int_value: 12617
}
}
...
- 如您所见,watcher可执行文件正在连续打印输出仿真时间和计数器的值
代码逐步说明
- 首先来看一下http://introspectable_plugin.cc源代码文件:
#include <functional>
#include <gazebo/common/common.hh>
#include <gazebo/physics/physics.hh>
#include <gazebo/util/IntrospectionManager.hh>
#include <sdf/sdf.hh>
namespace gazebo
{
class ModelPush : public WorldPlugin
{
public: void Load(physics::WorldPtr _parent, sdf::ElementPtr /*_sdf*/)
{
// Listen to the update event. This event is broadcast every
// simulation iteration.
this->updateConnection = event::Events::ConnectWorldUpdateBegin(
std::bind(&ModelPush::OnUpdate, this));
// Introspection callback.
auto fCounterValue = [this]()
{
return this->counter;
};
// Register the counter element.
gazebo::util::IntrospectionManager::Instance()->Register<int>(
"data://my_plugin/counter", fCounterValue);
}
// Called by the world update start event.
public: void OnUpdate()
{
++this->counter;
}
// Pointer to the update event connection.
private: event::ConnectionPtr updateConnection;
// A counter for testing the introspection capabilites.
private: int counter = 0;
};
// Register this plugin with the simulator.
GZ_REGISTER_WORLD_PLUGIN(ModelPush)
}
在Load()函数中,仿真世界更新事件被连接到OnUpdate()函数上。Load()函数中的其余代码将计数器注册到自检管理器中。 可以看到如何获取管理器的实例并调用Register()函数。必须指定注册项的类型(本例中为int)、注册项的字符串表示形式(data:// my_plugin/counter)和一个回调函数。在本示例中,回调函数是一个lambda函数。
自检管理器会将此回调函数与data://my_plugin/counter关联在一起。本质上,该字符串是管理器中该注册项的名称。回调函数会让管理器检索该注册项的下一个值。因此,如果有任何客户端对这个值感兴趣,则该注册项每次更新时,管理器都会调用该回调函数。 在该回调函数中,直接返回成员变量counter的值,但是您可以在该函数中随意编写所需的任何代码。
下面来研究一下watcher程序的源代码:
// Use the introspection service for finding the "sim_time" and "counter"
// items.
gazebo::util::IntrospectionClient client;
// Wait for the managers to come online.
std::set<std::string> managerIds = client.WaitForManagers(
std::chrono::seconds(2));
- 该可执行文件负责订阅一个特定的可自检注册项集合。我们创建了IntrospectionClient类来帮助自检服务的所有客户端。如您所见,这里实例化了一个IntrospectionClient类的对象,然后,就开始等待自检管理器上线。
// Pick up the first manager.
std::string managerId = *managerIds.begin();
- 从理论上讲,可以有多个自检管理器同时在运行,尽管在Gazebo中只会有一个自检管理器。这里正是基于这个假设条件进行操作的,因此会保存检测到的第一个自检管理器的ID。
// sim_time is a pre-registered item with the following URI format:
// data://world/<world_name>?p=<variable_type>/<variable_name>
std::string simTime = "data://world/default?p=time/sim_time";
std::string counter = "data://my_plugin/counter";
// Check if "sim_time" is registered.
if (!client.IsRegistered(managerId, simTime))
{
std::cerr << "The sim_time item is not registered on the manager.\n";
return -1;
}
// Check if "counter" is registered.
if (!client.IsRegistered(managerId, counter))
{
std::cerr << "The counter item is not registered on the manager.\n";
return -1;
}
// The variables to watch are registered with the manager
- 这个代码块会执行完整性检查,以确保两个注册项都在自检管理器中注册过了。
// Create a filter for watching the items.
std::string filterId, topic;
if (!client.NewFilter(managerId, {simTime, counter}, filterId, topic))
return -1;
// Let's subscribe to the topic for receiving updates.
ignition::transport::Node node;
node.Subscribe(topic, cb);
// zZZZ.
ignition::transport::waitForShutdown();
这段代码通知了自检管理器我们对一组注册项(simTime和counter)感兴趣。filterId和topic是输出变量。在这个函数后面,管理器会在话题topic下使用我们的自定义更新创建一个通信通道。 filterId是过滤器的唯一标识符,以防将来要更新或删除该过滤器。
最后,实例化了ignition :: transport :: Node节点,并使用该节点来订阅我们最近创建的话题。请注意,这里将cb回调函数作为参数传递给了该节点对象的订阅函数。这个回调函数将会定期执行以获得请求的值。
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号