



















ROS2与tf2入门教程-介绍
说明:
- 运行一个 turtlesim 演示,并在使用 turtlesim 的多机器人示例中查看 tf2 的一些功能。
步骤:
- 安装演示包及其依赖项
sudo apt-get install ros-foxy-turtle-tf2-py ros-foxy-tf2-tools
- 安装transforms3d包,它提供四元数和欧拉角转换功能
pip3 install transforms3d
- 测试turtle_tf2_py
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
- 效果如图
- 运行键盘控制
ros2 run turtlesim turtle_teleop_key
- 效果如图

tf2 工具
使用view_frames
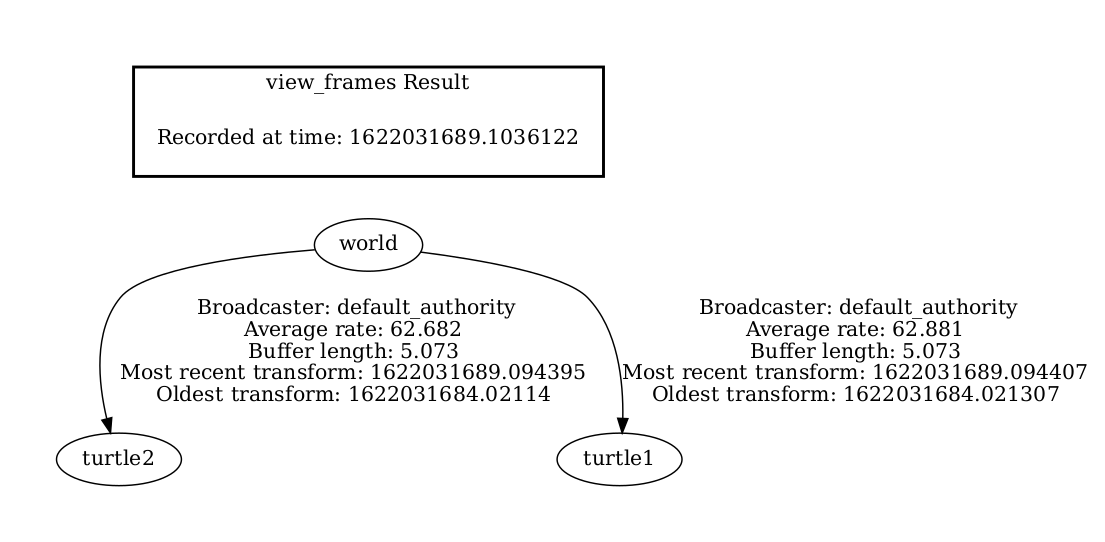
- 使用 view_frames,创建ROS广播的tf2树 。
ros2 run tf2_tools view_frames
- 结果如下
Listening to tf data during 5 seconds...
Generating graph in frames.pdf file...
- tf2侦听器侦听ROS广播的帧并绘制帧连接方式的树。
- 要查看tf2树,请frames.pdf使用您最喜欢的 PDF 查看器打开结果
使用tf2_echo
- 使用 tf2_echo,输出任意两帧之间的转换
ros2 run tf2_ros tf2_echo [reference_frame] [target_frame]
- turtle2框架相对于turtle1框架的变换
ros2 run tf2_ros tf2_echo turtle2 turtle1
- 结果如下:
At time 1622031731.625364060
- Translation: [2.796, 1.039, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.202, 0.979]
At time 1622031732.614745114
- Translation: [1.608, 0.250, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.032, 0.999]
在rviz中显示tf2
- 使用 rviz 看看我们的海龟框架
ros2 run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
- 效果图:
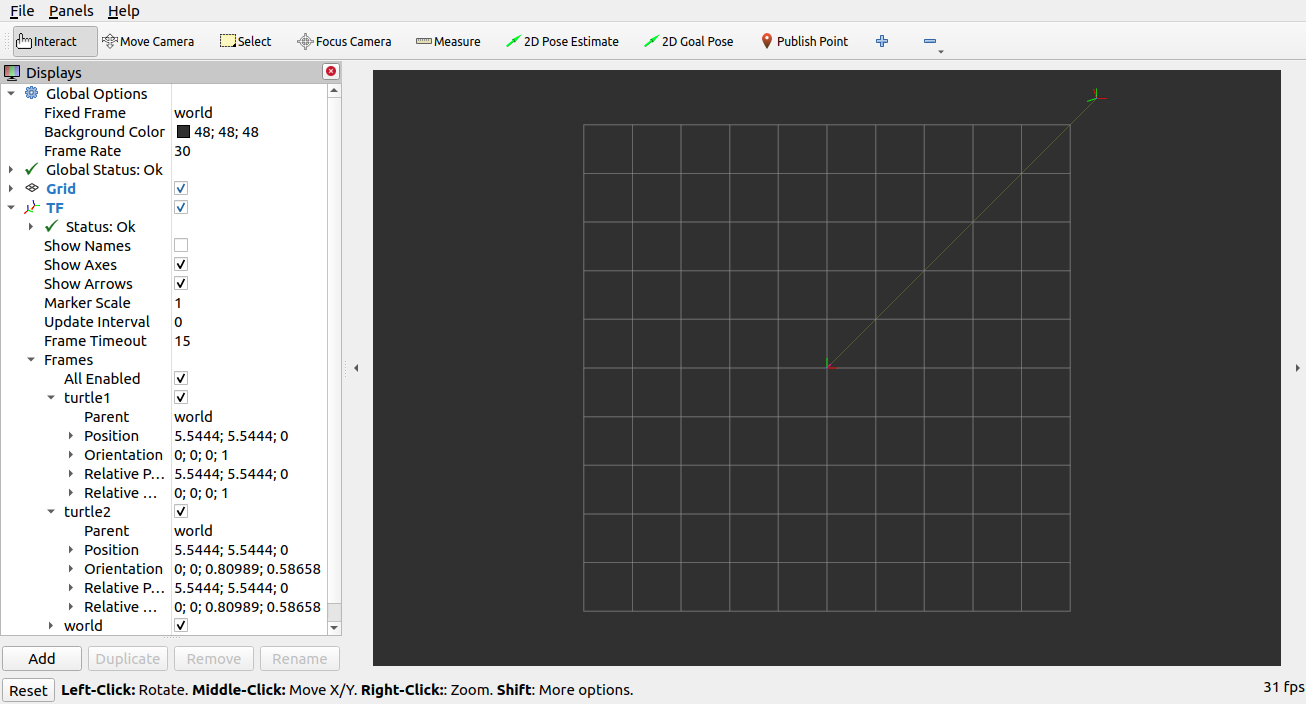
- 在侧栏中,您将看到 tf2 广播的帧。当您驾驶乌龟四处走动时,您会看到框架在 rviz 中移动
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号