



















ROS2入门教程-使用ROS2启动大型项目
说明:
- 介绍如何为大型项目编写启动文件的一些技巧
步骤:
创建新包launch_tutorial
在launch_tutorial包的launch目录中创建launch_turtlesim.launch.py,包含以下内容
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
turtlesim_world_1 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_1.launch.py'])
)
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
broadcaster_listener_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/broadcaster_listener.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
mimic_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/mimic.launch.py'])
)
fixed_frame_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/fixed_broadcaster.launch.py'])
)
rviz_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_rviz.launch.py'])
)
return LaunchDescription([
turtlesim_world_1,
turtlesim_world_2,
broadcaster_listener_nodes,
mimic_node,
fixed_frame_node,
rviz_node
])
- 在launch文件中设置参数,创建turtlesim_world_1.launch.py,包含以下内容
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration, TextSubstitution
from launch_ros.actions import Node
def generate_launch_description():
background_r_launch_arg = DeclareLaunchArgument(
'background_r', default_value=TextSubstitution(text='0')
)
background_g_launch_arg = DeclareLaunchArgument(
'background_g', default_value=TextSubstitution(text='84')
)
background_b_launch_arg = DeclareLaunchArgument(
'background_b', default_value=TextSubstitution(text='122')
)
return LaunchDescription([
background_r_launch_arg,
background_g_launch_arg,
background_b_launch_arg,
Node(
package='turtlesim',
executable='turtlesim_node',
name='sim',
parameters=[{
'background_r': LaunchConfiguration('background_r'),
'background_g': LaunchConfiguration('background_g'),
'background_b': LaunchConfiguration('background_b'),
}]
),
])
- 从yaml文件加载参数,创建一个turtlesim_world_2.launch.py文件,包含以下内容
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
config = os.path.join(
get_package_share_directory('launch_tutorial'),
'config',
'turtlesim.yaml'
)
return LaunchDescription([
Node(
package='turtlesim',
executable='turtlesim_node',
namespace='turtlesim2',
name='sim',
parameters=[config]
)
])
- 在config目录中,创建一个配置文件turtlesim.yaml
/turtlesim2/sim:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
- 创建turtlesim_world_3.launch.py
...
Node(
package='turtlesim',
executable='turtlesim_node',
namespace='turtlesim3',
name='sim',
parameters=[config]
)
- 修改turtlesim.yaml
/**:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
- 修改命名空间,turtlesim_world_2.launch.py
namespace='turtlesim2',
- 修改launch_turtlesim.launch.py文件
from launch.actions import GroupAction
from launch_ros.actions import PushRosNamespace
...
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
turtlesim_world_2_with_namespace = GroupAction(
actions=[
PushRosNamespace('turtlesim2'),
turtlesim_world_2,
]
)
- 重用节点,创建broadcaster_listener.launch.py文件
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
DeclareLaunchArgument(
'target_frame', default_value='turtle1',
description='Target frame name.'
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster2',
parameters=[
{'turtlename': 'turtle2'}
]
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_listener',
name='listener',
parameters=[
{'target_frame': LaunchConfiguration('target_frame')}
]
),
])
- 参数覆盖,修改broadcaster_listener.launch.py文件
broadcaster_listener_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/broadcaster_listener.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
- 重映射,创建mimic.launch.py文件
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='turtlesim',
executable='mimic',
name='mimic',
remappings=[
('/input/pose', '/turtle2/pose'),
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
)
])
- 配置文件,创建turtlesim_rviz.launch.py文件
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
rviz_config = os.path.join(
get_package_share_directory('turtle_tf2_py'),
'rviz',
'turtle_rviz.rviz'
)
return LaunchDescription([
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config]
)
])
- 环境变量,创建fixed_broadcaster.launch.py
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import EnvironmentVariable, LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
DeclareLaunchArgument(
'node_prefix',
default_value=[EnvironmentVariable('USER'), '_'],
description='prefix for node name'
),
Node(
package='turtle_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name=[LaunchConfiguration('node_prefix'), 'fixed_broadcaster'],
),
])
- 运行启动文件,修改setup.py
data_files=[
...
(os.path.join('share', package_name, 'launch'),
glob(os.path.join('launch', '*.launch.py'))),
(os.path.join('share', package_name, 'config'),
glob(os.path.join('config', '*.yaml'))),
],
- 构建运行
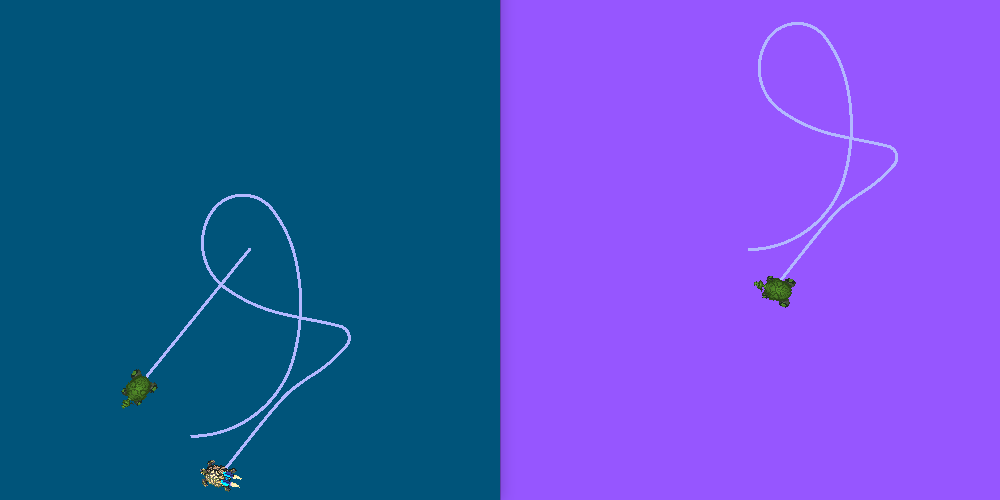
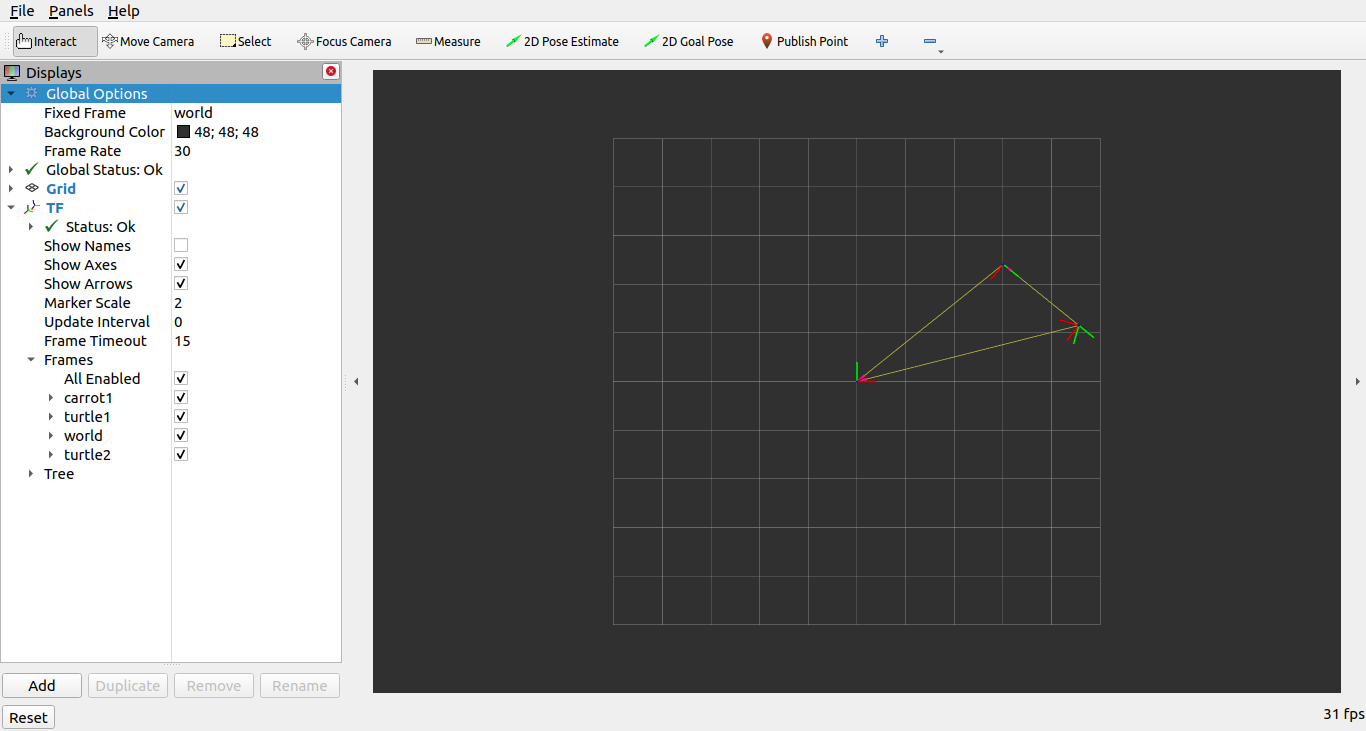
ros2 launch launch_tutorial launch_turtlesim.launch.py
- 控制turtle1,运行teleop节点
ros2 run turtlesim turtle_teleop_key
- 结果如下
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号