



















PX4与仿真入门教程-dronedoc-添加新模型
PX4与仿真入门教程-dronedoc-添加新模型
说明:
- 介绍使用 2D 激光雷达创建 Iris 模型
步骤:
- 创建一个目录 iris_2d_lidar 来存储 Iris 模型
cd ~/dronedoc_ws/src/px4_sim_pkg
mkdir -p models/iris_2d_lidar
- 创建 SDF 文件
- Gazebo 使用一种称为 SDF 的格式来定义机器人模型
- SDF和URDF的关系参见说明
- 想在 Gazebo 中使用 URDF,参考教程
- 创建一个 model.sdf 文件。这是定义机器人物理模型和形状的文件
- SDF 允许您包含和重用现有模型
- 通过编写以下内容来包含现有模型
<include>
<uri>model://iris</uri>
</include>
- 我们将使用来自 PX4 Firmware 的 iris 模型
- 以这种方式包含时GAZEBO_MODEL_PATH,必须设置要用于的模型的路径
- 如果已经按照本教程搭建了环境,那么模型路径应该已经设置好了
export GAZEBO_MODEL_PATH=$HOME/src/Firmware/Tools/sitl_gazebo/models:$GAZEBO_MODEL_PATH
- 创建在model.sdf文件
vim models/iris_2d_lidar/model.sdf
- 内容如下:
<?xml version='1.0'?>
<sdf version='1.6'>
<model name='iris_2d_lidar'>
<include>
<uri>model://iris</uri>
</include>
<link name="lidar_link">
<pose>0 0 0.05 0 -0.0085 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.01</mass>
<inertia>
<ixx>2.1733e-6</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>2.1733e-6</iyy>
<iyz>0</iyz>
<izz>1.8e-7</izz>
</inertia>
</inertial>
<visual name="lidar_visual">
<geometry>
<cylinder>
<radius>0.01</radius>
<length>0.05</length>
</cylinder>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<sensor name="laser" type="ray">
<pose>0 0 0.02 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-2.0944</min_angle>
<max_angle>2.0944</max_angle>
</horizontal>
</scan>
<range>
<min>0.1</min>
<max>15</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="LaserPlugin" filename="libgazebo_ros_laser.so">
<topicName>/laser/scan</topicName>
<frameName>/lidar_link</frameName>
</plugin>
<always_on>1</always_on>
<update_rate>40</update_rate>
<visualize>true</visualize>
</sensor>
</link>
<joint name="lidar_joint" type="fixed">
<child>lidar_link</child>
<parent>iris::base_link</parent>
</joint>
</model>
</sdf>
- 创建在model.config文件
vim models/iris_2d_lidar/model.config
- 内容如下:
<?xml version="1.0"?>
<model>
<name>iris_2d_lidar</name>
<version>1.0</version>
<sdf>model.sdf</sdf>
<author>
<name>Takaki Ueno</name>
<email>t_ueno@eis.hokudai.ac.jp</email>
</author>
<description>
Iris with 2d horizontal lidar.
</description>
</model>
- 增加模型路径到gazebo的模拟路径变量里
cd ~/tools/dronedoc/
vim load_environment.sh
- 添加
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/dronedoc_ws/src/px4_sim_pkg/models
测试:
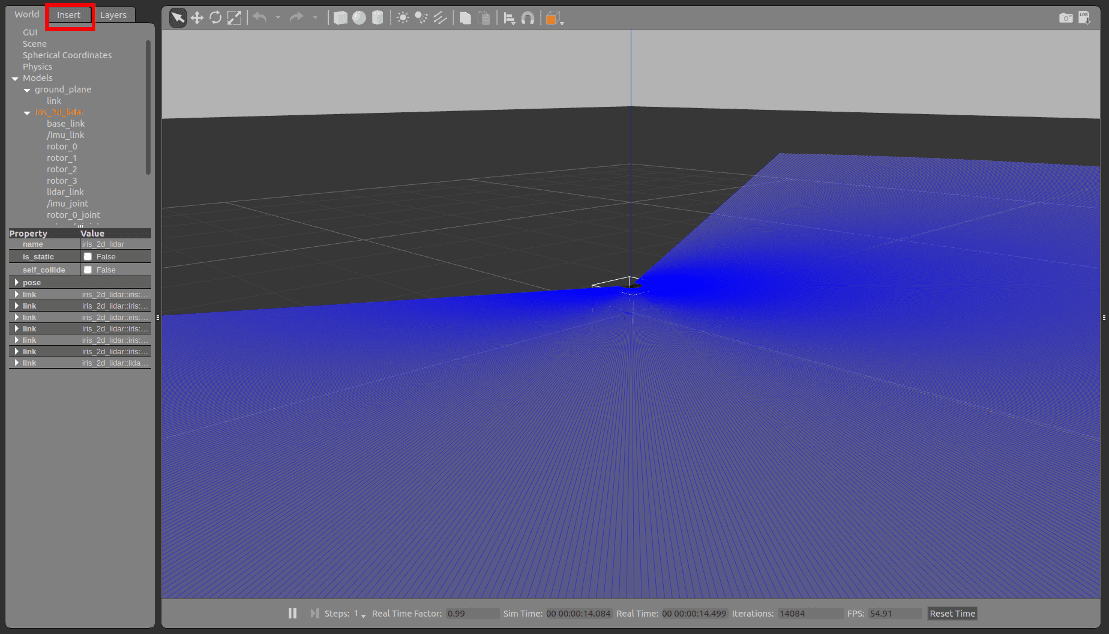
- 运行gazebo
cd ~/tools/dronedoc/
source load_environment.sh
gazebo
- 效果如下:
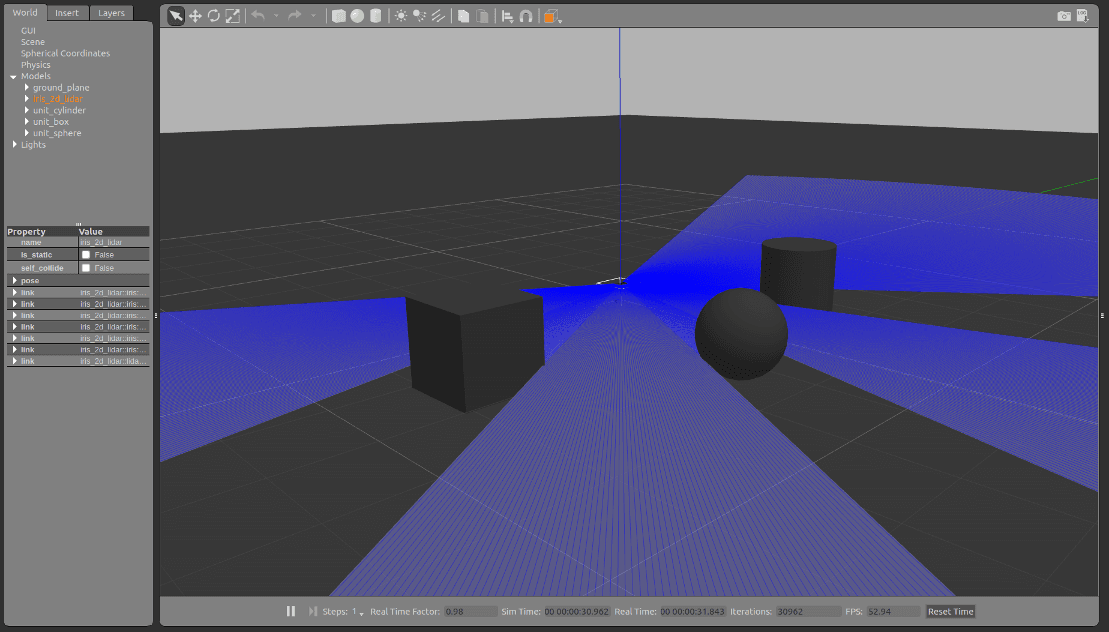
- 插入模型,效果如下:
- 可以通过posix_sitl.launch指定模型运行
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4 posix_sitl.launch sdf:=$HOME/dronedoc_ws/src/px4_sim_pkg/models/iris_2d_lidar/model.sdf
- 可以通过mavros_posix_sitl.launch指定模型运行
cd ~/tools/dronedoc/
source load_environment.sh
roslaunch px4 mavros_posix_sitl.launch sdf:=$HOME/dronedoc_ws/src/px4_sim_pkg/models/iris_2d_lidar/model.sdf
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号