



















Turtlebot3-ARM入门教程-抓取挑战之任务流程说明
说明
- 本教程介绍整个抓取挑战的任务流程
任务流程
- 在官方默认的抓取挑战demo中,机器人需要从客厅抓取四个不同的物体到特定的地方,再回到起点
默认情况下,机器人应放置在在地图的原点(0,0),在Rviz初始化位姿后,启动任务
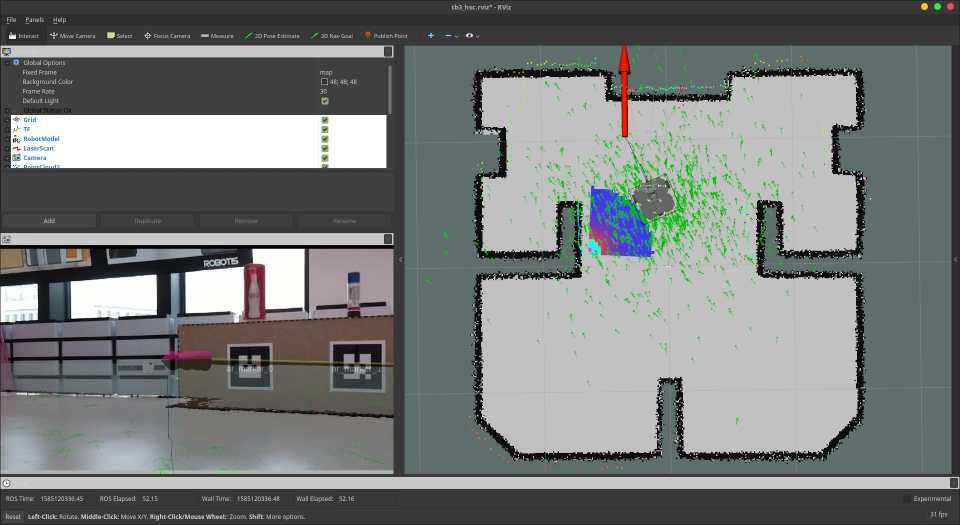
任务启动后,机器人会寻找需要附近的第一个抓取对象的AR标签

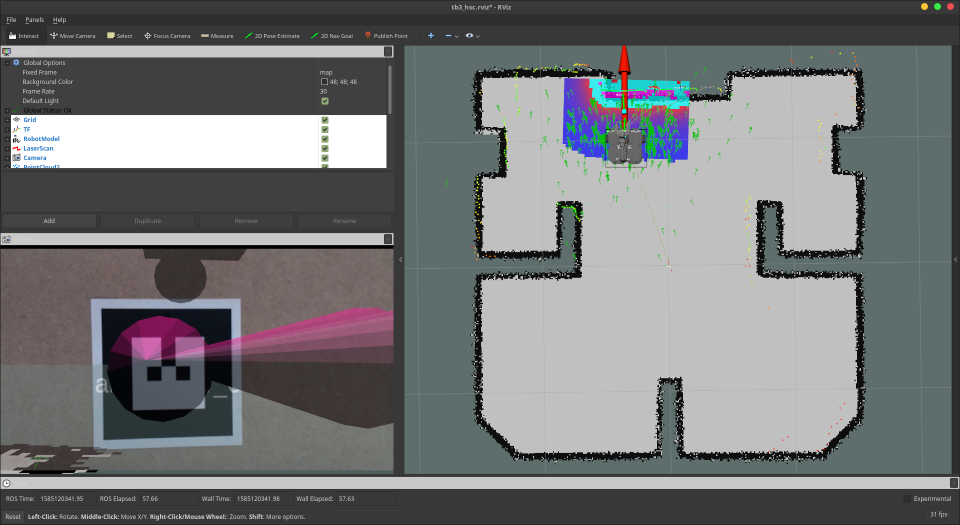
- 找到抓取对象的AR标签后,通过导航到达AR标签的附近位置,再通过计算AR标签的位置,不断调整且接近抓取对象(使用话题:
/tb3_hsc/cmd_vel)
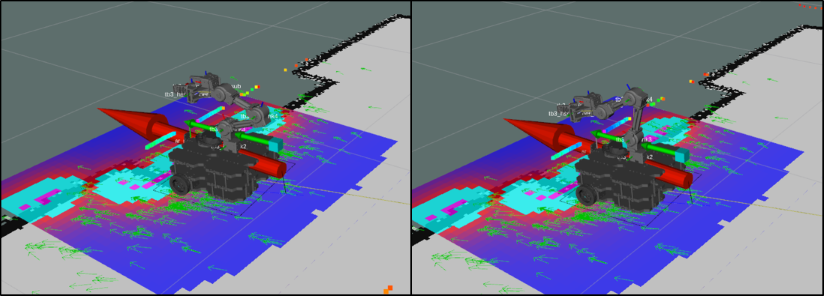
- 接近抓取对象后,使用OpenMANIPULATOR-X进行抓取
- 抓取完后,其会导航到下一个目标房间的中心
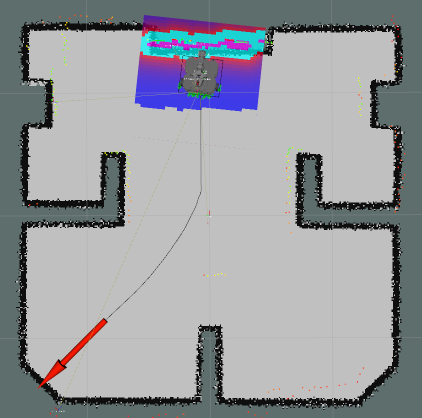
导航过程中同时寻找放置抓取对象的目标位置
接近放置抓取对象的目标位置
使用OpenMANIPULATOR-X进行放置
导航回到起点,再继续寻找下一个抓取对象的AR标签
10.诸如类推,抓取放置完最后的抓取对象时,回到起点
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号