



















autodrive入门教程-MIT实验-绘制航点
autodrive入门教程-MIT实验-绘制航点
说明:
- 介绍如何在已有地图上生成对应的运动轨迹
步骤:
- 参考上一节,更改map_server使用的地图
- [autodrive] 启动底盘
$ roslaunch racebot minimal.launch
- [autodrive] 启动激光雷达
$ roslaunch racebot_nav laser.launch
- [autodrive] 启动定位
$ roslaunch localization localize.launch
- [autodrive] 启动轨迹生成程序
$ roslaunch path_planning build_trajectory.launch
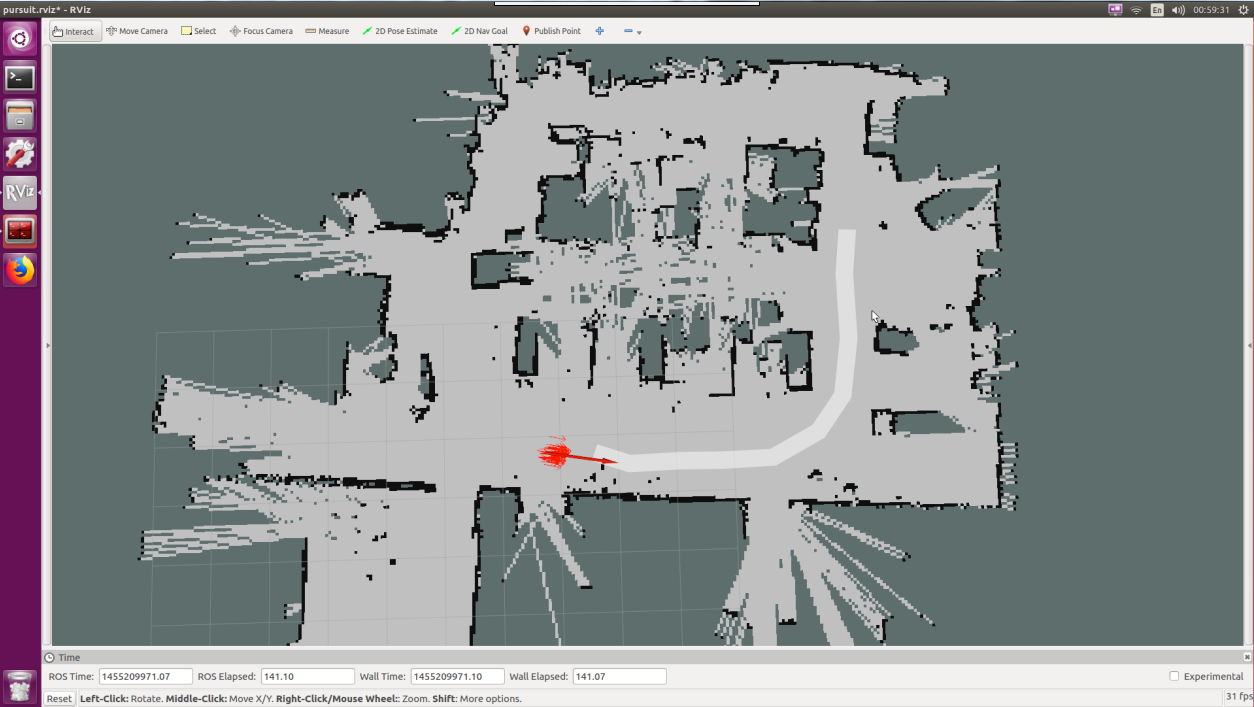
- [Remote PC] 启动rviz
roslaunch path_planning pursuit_rviz.launch
- 通过点击rviz工具"2D Nav Goal" ,在地图上设置目标点,从而的一条行走的路径。
- 设置完成之后,终止build_trajectory.launch的启动终端,既可以生成轨迹文件
- 文件位于path_planning包的trajectories目录下,名为new.traj
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号