



















Ailibot-QT教程-按钮控制小乌龟运动
说明
- 在ROS QT GUI模板的基础上,实现按钮控制小海龟运动,向前,向后,向左,向右移动
操作步骤
- 安装turtlesim功能包
$ sudo apt-get install ros-kinetic-turtlesim
- 启动roscore
$ roscore
- 启动小海龟节点
$ rosrun turtlesim turtlesim_node
- 在新终端,运行QT程序
$ ~/tools/ailibot_qt/ailibot_qt_tortoise
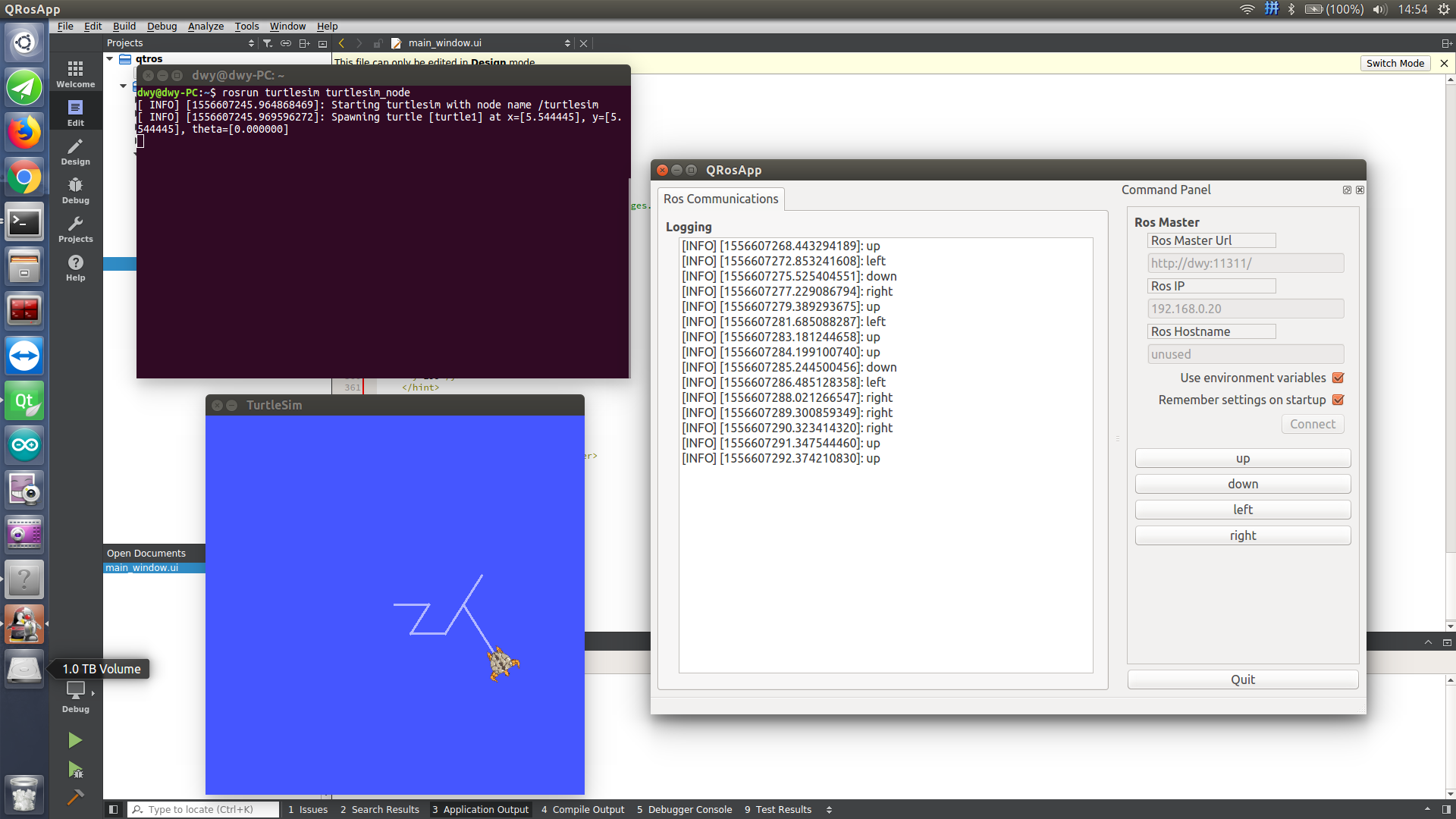
勾选
Use environment variables,点击按钮Connect点击按钮
up、down、left、right,小海龟将向前、向后、向左、向右移动
效果如下
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号