



















ROS史话36篇.17 ROS之物体操控 manipulation
ROS C-Turtle版本增加了针对PR2机器人抓取的软件包:如检测桌面物体、用机械手对物体进行抓取和操控等。我们从下面的例子可以大致了解在很多情形下,对四周环境中的物体控制有多么重要。
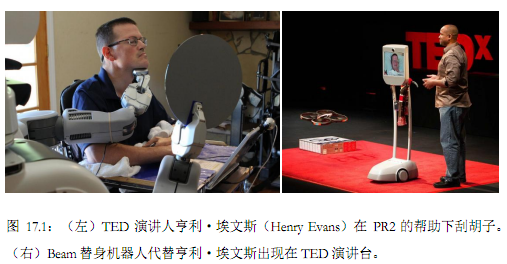
大家可能看过下面这个TED演讲,演讲人亨利·埃文斯(Henry Evans)通过视频向观众讲述他的故事。他的形象出现在TED现场的舞台中央站立的一个机器人屏幕里,这个机器人就是前面提到的Beam替身机器人(这不是重点)。
亨利·埃文斯在40岁的时候,忽然从一名正常人,变成一名四肢瘫痪、口不能言的残疾人。亨利·埃文斯讲述了自己如何在机器人PR2的帮助下,照顾自己的生活:刮胡子、开冰箱、倒饮料…
对一个拥有双臂的机器人来讲,对环境的感知和对物体操控一定是优先级最高的。在阿C龟版本里,这些功能包含在manipulation软件包里。这个软件包是由车库的两位研究科学家凯仁·萧(Kaijen Hsiao)和马泰·乔卡列(Matei Ciocarlie)开发的。
凯仁·萧毕业于麻省理工人工智能实验室,获博士学位,导师是托马斯·洛萨诺-佩雷斯(Tomás Lozano-Pérez)和莱斯利·凯尔博灵(Leslie Kaelbling)。博士期间研究的内容就是“如何稳定地抓取物体”。

离开车库后,凯仁·萧去了博世(Bosch)机器人,后来在博世支持下,创办了MayField机器人公司,担任公司的首席技术官(CTO),产品为家庭陪伴机器人Kuri。
马泰·乔卡列毕业于哥伦比亚大学,获博士学位,研究方向是机器人对外部物体的抓取与操控。EigenGrasp即为马泰·乔卡列的研究成果。离开车库后,马泰·乔卡列在Google短期工作了一段时间,然后回自己的母校哥伦比亚大学建立一个新实验室,做机器人相关的研究去了。

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号