



















ROS史话36篇.06 ROS之父
ROS最早是由前面提到的摩根·奎格利(MorganQuigley)设计的,因此在柳树车库机器人公司内部把奎格利称为ROS之父。
奎格利从小就喜欢编程。小学期间,就开始在苹果2型(APPLE II)电脑上,用Logo语言控制屏幕上的“小乌龟”运动。正是编程者们儿时的记忆,促成后来ROS的每个版本的吉祥物都是“小乌龟”的形象。
当然,那时候,很多美国小朋友都在“小乌龟”环境中学习编程的。那个时代,“小乌龟”是很多程序员们的美好记忆。
后面会专门介绍这些“小乌龟”和ROS的“乌龟帮”。
1998年,摩根·奎格利离开“小乌龟”,背上行囊,走进大学校园。他在犹他州的杨百翰大学(BrighamYoung University)主修了两个专业。一个专业是计算机科学,另一个专业是音乐。他还辅修了数学专业。
在大学里,他第一次看到机器人,立马就被这些由机械、电子、计算机软件构成的小家伙们吸引了。他发现,计算机软件不再是“虚”的东西,其实软件可以通过机器人来体验真实的世界。他在机器智能实验室学习,制作了一些小型无人机,可以通过计算机程序控制这些无人机。
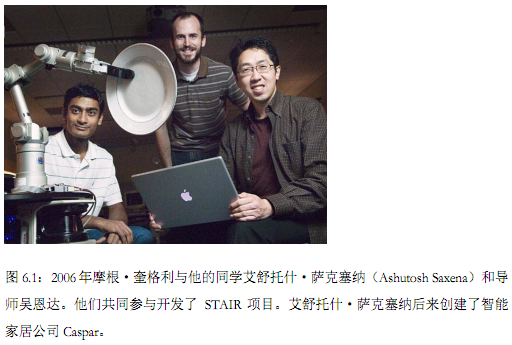
2005年摩根·奎格利申请到斯坦福大学人工智能实验室读博士,吴恩达是他的导师。他跟着吴恩达做过不少机器人和机器学习的项目。这些项目包括机械臂、机械手、无人机、强化学习、视觉辅助物体的抓取等五花八门的项目。
在吴恩达的带领下,摩根·奎格利参与到STAIR项目中,希望通过各种现有的硬件和软件,通过集成到一个机器人上的方式,打造一款“个人机器人”助手。原来的机器人大多是执行单一任务的专业机器人,吴恩达则希望摩根·奎格利利用软硬件的开发经验,负责软硬件的系统集成任务。
最终,摩根·奎格利的毕业论文也是与之直接相关的,他的论文题目是“Hardwareand Software Systems for Personal Robots”(个人机器人的软硬件系统)。
这样一个机器人助手的助手在当时是非常新的概念,不但可以帮人端茶倒水、还可以开门、关门、帮人取报纸、实现各种在家庭和办公室的任务。他希望这样的个人机器人系统,可以像个人电脑一样进入千家万户。后来,摩根·奎格利将STAIR项目软硬件系统的内容,整理出文章,发表在国际知名的机器人会议ICRA上。
Morgan Quigley, Eric Berger, Andrew Y. Ng. STAIR: Hardware and Software Architecture,IEEE ICRA 2007
那个时候,柳树车库机器人公司刚刚成立,吴恩达帮助其开发PR2机器人和软件系统(即ROS),摩根·奎格利则利用在STAIR项目中积累的经验,成为ROS开发框架的主责任。STAIR项目的软件系统Switchyard则演变成后来ROS,其主要思想发表在2009年的机器人会议ICRA上:
ROS: AnOpen-Source Robot Operating System,2009年在IEEE机器人与自动化大会发表(IEEE ICRA 2009)
2012年,摩根·奎格利终于博士毕业了,他选择作为首席架构师,与布莱恩·格基(Brian Gerkey,CEO)、罗伯特·弗里德曼(Roberta Friedman, CFO)、凯特·考尼(Nate Koenig, CTO)一起创建了“开源机器人基金会 (OpenSource Robot Foundation,OSRF)”。后来,柳树车库将ROS的开发和维护工作转移到新成立的OSRF。
鉴于摩根·奎格利在开源软件ROS上的贡献,2013年,他被《麻省理工学院科技评论》(MIT Technology Review) 杂志评选为35岁以下杰出青年创新人物2。

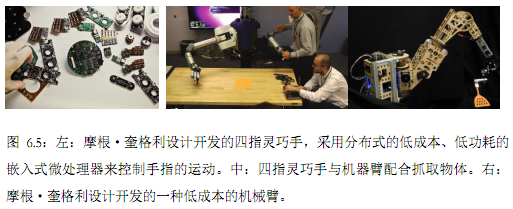
随着ROS逐渐稳定,摩根·奎格利的精力转向各类机器人开发工作。如果走进摩根·奎格利的在开源机器人基金会位于办公室,会看到散乱在桌子上的机械手、机械臂、和大大小小的嵌入式芯片。
摩根·奎格利一直致力于将ROS,尤其是将新的ROS2应用在低成本、低功耗的嵌入式系统上。这样的嵌入式系统可以广泛应用到机器人手臂和各类柔性操控装置上。拿摩根·奎格利设计的四指机械手为例,四个指头的运动并不是由单个CPU来控制,而是由十几个独立的低成本、低功耗的嵌入式微处理器来控制,每个手指关节由一个单独的微处理器来控制。这样的分布式设计和控制方式可以极大的简化控制过程的通讯问题。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号