



















Turbot3-vslam入门教程-视觉建图-ORB-SLAM-V2建图(D435i)
Turbot3-vslam入门教程-视觉建图-ORB-SLAM-V2建图(D435i)
说明:
- 介绍如何利用turbot3机型进行ORB-SLAM-V2建图
操作步骤
- [Remote PC] 启动roscore
$ roscore
- [Remote PC] 通过远程ssh进入到Turbot3,以下ip应为Turbot3对应的ip地址
$ ssh ubuntu@ip
- [Turbot3]启动底盘
$ roslaunch turbot3_bringup minimal.launch
- [Turbot3]启动键盘控制
$ roslaunch turbot3_teleop keyboard.launch
- [Remote PC] 先确认Turbot3的IP地址后,启动VNC Viewer进入Turbot3的桌面
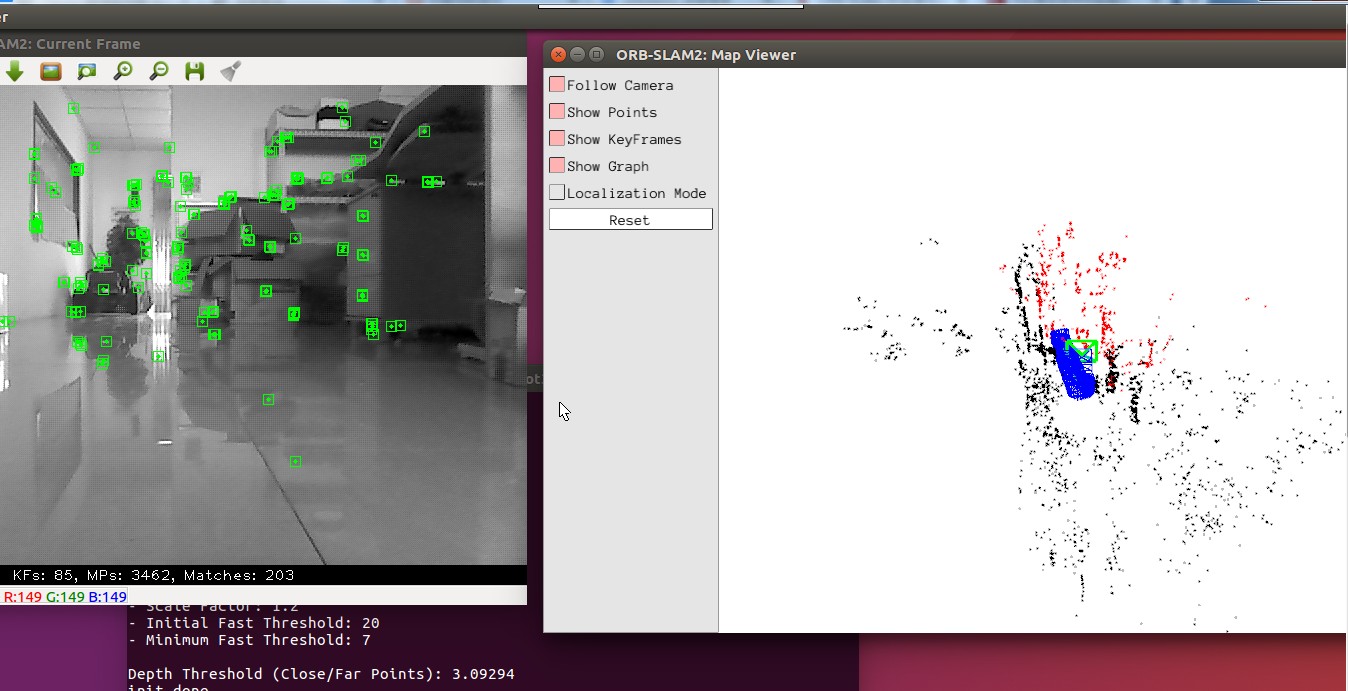
在Turbot3远程桌面上运行ORB-SLAM-V2
[VNC Viewer]启动orb_slam
$ roslaunch turbot3_vslam orb_slamv2_d435i.launch
注:远程桌面运行相对较慢
- 控制小车移动,进行建图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号