



















ROS与QT语言入门教程-使用PyQt发布话题
ROS与QT语言入门教程-使用PyQt发布话题
说明
- 介绍如何在ROS下使用Python Qt语言发布话题
步骤:
- 安装PyQt4
sudo apt-get instal python-qt4
- 检验是否安装成功
代码编写界面
#!/usr/bin/env python
import sys
import rospy
from std_msgs.msg import String
from PyQt4 import QtGui
from PyQt4.QtGui import QLabel, QVBoxLayout, QHBoxLayout, QSlider, QPushButton
from PyQt4.QtCore import Qt
class PyGui(QtGui.QWidget):
def __init__(self):
super(PyGui, self).__init__()
self.setObjectName('PyGui')
self.pub = rospy.Publisher("pyqt_topic", String, queue_size=10)
rospy.init_node('pyqt_gui')
self.current_value = 0
my_layout = QHBoxLayout()
my_btn = QPushButton()
my_btn.setText("Publisher")
my_btn.setFixedWidth(130)
my_btn.clicked.connect(self.publish_topic)
my_layout.addWidget(my_btn)
my_layout.addSpacing(50)
self.my_label = QLabel()
self.my_label.setFixedWidth(140)
self.my_label.setText("num: " + str(0))
self.my_label.setEnabled(False)
my_layout.addWidget(self.my_label)
my_slider = QSlider()
my_slider.setMinimum(0)
my_slider.setMaximum(99)
my_slider.setOrientation(Qt.Horizontal)
my_slider.valueChanged.connect(self.changeValue)
my_vlay = QVBoxLayout()
my_vlay.addWidget(my_slider)
layout = QVBoxLayout()
layout.addLayout(my_layout)
layout.addLayout(my_vlay)
self.setLayout(layout)
# self.show()
def publish_topic(self):
self.pub.publish(str(self.current_value))
def changeValue(self, value):
self.my_label.setText("num: " + str(value))
self.current_value = value
if __name__ == "__main__":
app=QtGui.QApplication(sys.argv)
pyShow = PyGui()
pyShow.show()
sys.exit(app.exec_())
代码解释
在init函数中,定义一个发布者pyqt_topic
定义一个按钮控件my_btn ,一个标签my_label ,一个滑动条控件my_slider
为滑动条添加槽函数changeValue
为按钮添加槽函数publish_topic
运行
- 给python脚本文件添加执行权限
chmod +x demo.py
- 打开一个终端,运行ros master
roscore
- 打开另一个终端,运行脚本文件
./demo.py
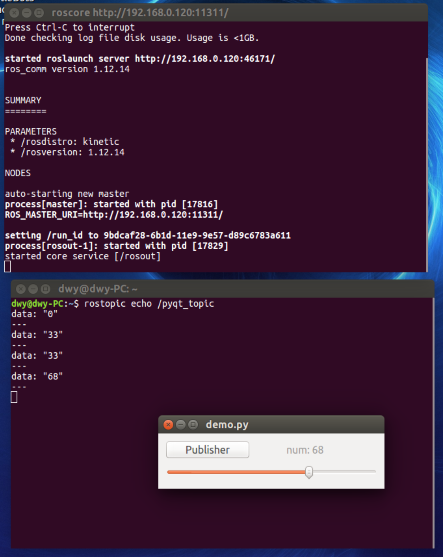
- 打开另一个终端,查看pyqt_topic话题
rostopic echo /pyqt_topic
效果图
参考资料
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号