



















ROS与QT语言入门教程-按钮调用ROS的librviz
ROS与QT语言入门教程-按钮调用ROS的librviz
说明:
- 在ROS QT GUI模板上,按钮调用ROS的librviz
运行和测试librviz应用程序
- 安装预编译的Debian软件包
$ sudo apt-get install ros-kinetic-visualization-tutorials
- 启动 ros master
$ roscore
- 运行librviz应用程序
$ rosrun librviz_tutorial myviz
- 弹出下面的界面
按钮调用ROS的librviz步骤:
- 下载
librviz源码
$ git clone https://github.com/ros-visualization/visualization_tutorials
- 创建ros qt包
$ catkin_create_qt_pkg test3
所有的源代码放在
visualization_tutorials/librviz_tutorials/src目录下把myviz.h复制到test3包的include目录下
把myviz.cpp复制到test3包的src目录下
在qtcreator创建工程文件
编辑
main_windows.cpp和myviz.cpp,添加头文件#include "../include/test3/myviz.h"
编辑
main_window.hpp头文件把#include <QtGui/QMainWindow> 修改为 #include <QtWidgets/QMainWindow>
编辑
main_window.ui文件拖入一个按钮控件,名为librviz
在按钮空间上右击,选择Go to slot... -> clicked()
编辑
main_windows.cpp源文件
namespace test3 {
void test3::MainWindow::on_pushButton_clicked()
{
MyViz* myviz = new MyViz();
myviz->show();
myviz->resize(600,400);
myviz->setWindowTitle("Mapping Show");
}
}
代码解释:创建对象myviz,并且进行显示,设置它的大小为600 x 400,并且命名标题为Mapping Show
- 编辑
CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8.0)
project(test3)
set(CMAKE_INCLUDE_CURRENT_DIR ON)#added
find_package(catkin REQUIRED COMPONENTS roscpp rviz)#deleted qt_build added rviz
find_package(Qt5 REQUIRED Core Widgets)#added
set(QT_LIBRARIES Qt5::Widgets)#added
include_directories(${catkin_INCLUDE_DIRS})
catkin_package()
#rosbuild_prepare_qt4(QtCore QtGui) # Add the appropriate components to the component list here
file(GLOB QT_FORMS RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} ui/*.ui)
file(GLOB QT_RESOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} resources/*.qrc)
file(GLOB_RECURSE QT_MOC RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS include/test3/*.hpp *.h)
QT5_ADD_RESOURCES(QT_RESOURCES_CPP ${QT_RESOURCES})
QT5_WRAP_UI(QT_FORMS_HPP ${QT_FORMS})
QT5_WRAP_CPP(QT_MOC_HPP ${QT_MOC})
file(GLOB_RECURSE QT_SOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS src/*.cpp)
add_executable(test3 ${QT_SOURCES} ${QT_RESOURCES_CPP} ${QT_FORMS_HPP} ${QT_MOC_HPP})
target_link_libraries(test3 ${QT_LIBRARIES} ${catkin_LIBRARIES})
install(TARGETS test3 RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
- 编辑
package.xml
<build_depend>rviz</build_depend>
<run_depend>rviz</run_depend>
<build_depend>qtbase5-dev</build_depend>
<run_depend>libqt5-core</run_depend>
<run_depend>libqt5-gui</run_depend>
<run_depend>libqt5-widgets</run_depend>
编译运行
- 在终端运行:
$ roscore
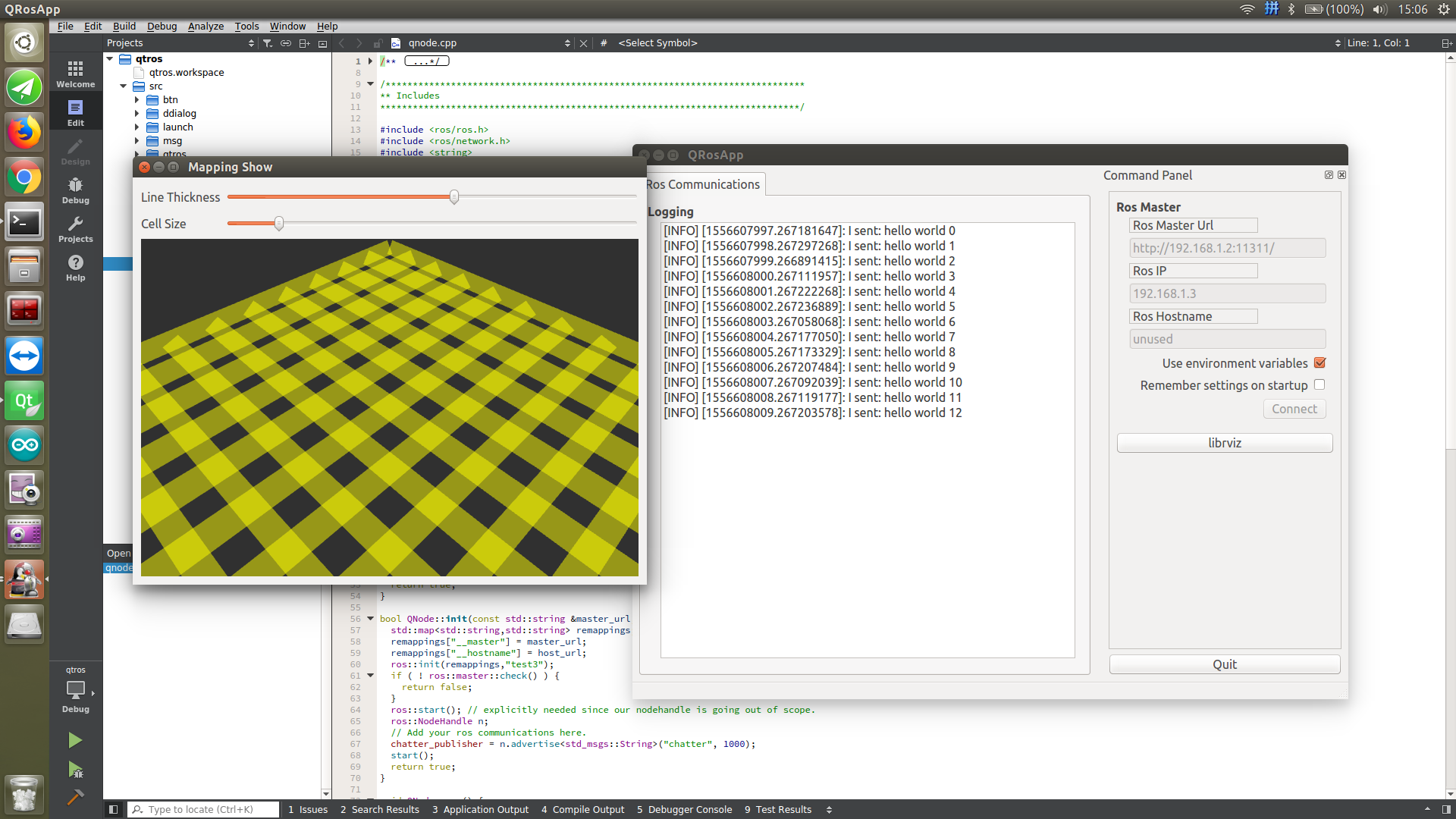
运行qt程序
点击按钮
connect->libviz拉动
Line Thickness滑条,调整线的粗细拉动
Cell Size滑条,调整块的大小
参考资料
http://docs.ros.org/fuerte/api/librviz_tutorial/html/
https://github.com/ros-visualization/visualization_tutorials
https://blog.csdn.net/qq_30460905/article/details/79210300
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号