



















TEB轨迹规划算法教程-阿克曼车型路径规划
TEB轨迹规划算法教程-阿克曼车型路径规划
说明:
- 介绍如何为类似汽车的机器人设置规划器(实验)
原理:
导航包规划和导航不适用于类似汽车的机器人。
但是teb_local_planner试图通过提供适用于ackermann驱动器的本地规划来克服此限制。
这是通过将非完整约束延伸到转弯半径resp上的最小界限来实现的。
通过满足v/omega > r_min。
teb_local_planner必须确实遵守导航包的规范,通过提供包含平移和角速度v和omega的geometry_msgs/Twist消息
分别用于命令机器人而不是提供ackermann_msgs/AckermannDriveStamped消息。
有关详细信息,请参阅命令接口部分。
最小转弯半径由ros参数〜
/min_turning_radius设置(参见Node-Api)。 您可以将值设置得稍大,因为在优化(惩罚)中使用软约束执行边界。
请注意,必须关闭或替换导航包提供的backup/escape行为,因为它们不支持类似汽车的机器人。
类似汽车的机器人设置需要向后驱动的能力。
因此,如果最小转弯半径不为零,则忽略参数〜
/weight_kinematics_forward_drive。 支持类似汽车的机器人/阿克曼驱动器仍处于试验阶段。
检查优化的轨迹
- 在设置用于导航的机器人之前,您可能想要尝试查看规划器如何优化类似汽车的机器人的轨迹。
- 重复优化教程设置和测试优化,并使用rqt_reconfigure调整参数〜
/min_turning_radius。 - 看看发生了什么。
命令接口
- 本教程区分了与机器人硬件节点通信的不同类型的接口。
平移和角速度
- 这种硬件驱动程序接受机器人的平移和角速度。
- 在前轮驱动的情况下,通常在后轴的中心处限定速度。
- 对于此类型,可以直接使用已发布的geometry_msgs/Twist消息。
平移速度和转向角
- 包括平移速度v和转向角φ的相关变量如下图所示。
- ICR表示即时旋转中心。
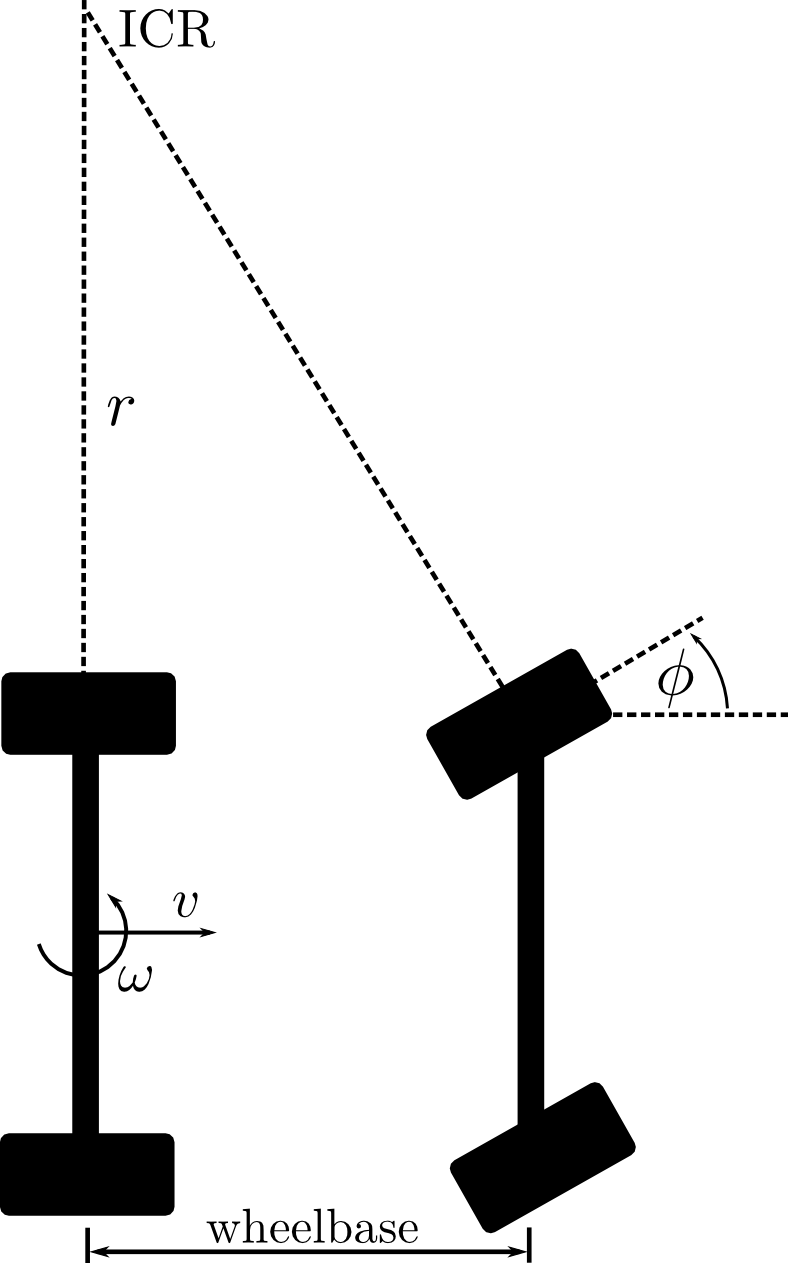
- 对于消失的角速度ω= 0,转弯半径r趋于无穷大,这又导致零转向角phi = 0。
- 否则转弯半径r可能由v/omega计算。
- 然后,转向角由phi = atan(轴距/ r)导出(其确实包括第一种情况)。
- 注意,使用上面介绍的等式,没有为v = 0定义转向角。
- 可以使用最后已知的有效转向角。
- 然而,在下文中,我们假设对于消失的平移速度,将(期望的)转向角设定为零。
Twist消息
- 某些命令接口(例如类似汽车模式的stage模拟器)需要geometry_msgs/Twist,但语义已更改。
- 角速度(z轴)被解释为转向角。
- 注意,通常不优选更改消息的语义,如果可能,最好切换到ackermann_msgs接口。
Ackermann消息
- 如果机器人硬件节点接受ackermann_msgs包提供的ackermann_msgs/AckermannDriveStamped消息,则必须转换速度命令。
- 一种可能的方法是添加一个小的转换器脚本/节点,将geometry_msgs/Twist转换为所需的类型。
- 以下片段将从规划器获得的平移和角速度转换为新类型。
#!/usr/bin/env python
import rospy, math
from geometry_msgs.msg import Twist
from ackermann_msgs.msg import AckermannDriveStamped
def convert_trans_rot_vel_to_steering_angle(v, omega, wheelbase):
if omega == 0 or v == 0:
return 0
radius = v / omega
return math.atan(wheelbase / radius)
def cmd_callback(data):
global wheelbase
global ackermann_cmd_topic
global frame_id
global pub
v = data.linear.x
steering = convert_trans_rot_vel_to_steering_angle(v, data.angular.z, wheelbase)
msg = AckermannDriveStamped()
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = frame_id
msg.drive.steering_angle = steering
msg.drive.speed = v
pub.publish(msg)
if __name__ == '__main__':
try:
rospy.init_node('cmd_vel_to_ackermann_drive')
twist_cmd_topic = rospy.get_param('~twist_cmd_topic', '/cmd_vel')
ackermann_cmd_topic = rospy.get_param('~ackermann_cmd_topic', '/ackermann_cmd')
wheelbase = rospy.get_param('~wheelbase', 1.0)
frame_id = rospy.get_param('~frame_id', 'odom')
rospy.Subscriber(twist_cmd_topic, Twist, cmd_callback, queue_size=1)
pub = rospy.Publisher(ackermann_cmd_topic, AckermannDriveStamped, queue_size=1)
rospy.loginfo("Node 'cmd_vel_to_ackermann_drive' started.\nListening to %s, publishing to %s. Frame id: %s, wheelbase: %f", "/cmd_vel", ackermann_cmd_topic, frame_id, wheelbase)
rospy.spin()
except rospy.ROSInterruptException:
pass
- 在例程里,可以执行
rosrun teb_local_planner_tutorials cmd_vel_to_ackermann_drive.py
机器人足迹模型
- 类似汽车的机器人通常构成非圆形形状/轮廓。
- 因此,您可能需要仔细查看教程避障和机器人足迹模型。
完整例子:
- 安装例程,查看第一篇
- 检查参数和配置
- 启动脚本:
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch
- 修改参数:
rosrun rqt_reconfigure rqt_reconfigure
- 或者修改配置文件
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号