



















Turtlebot3-ROS2入门教程-Topic Monitor
Turtlebot3-ROS2入门教程-Topic Monitor
说明
- 本教程介绍怎样使用rqt工具来查看TurtleBot3的话题状态
相关设备:
- Turtlebot3-ROS2套件,采购地址
操作步骤
- [TurtleBot] 启动小车
$ ros2 launch turtlebot3_bringup robot.launch.py
- [Remote PC] 启动rqt
$ rqt
注意:rqt打开后,在左上菜单栏选中
Plugin>Topics>Topic Monitor
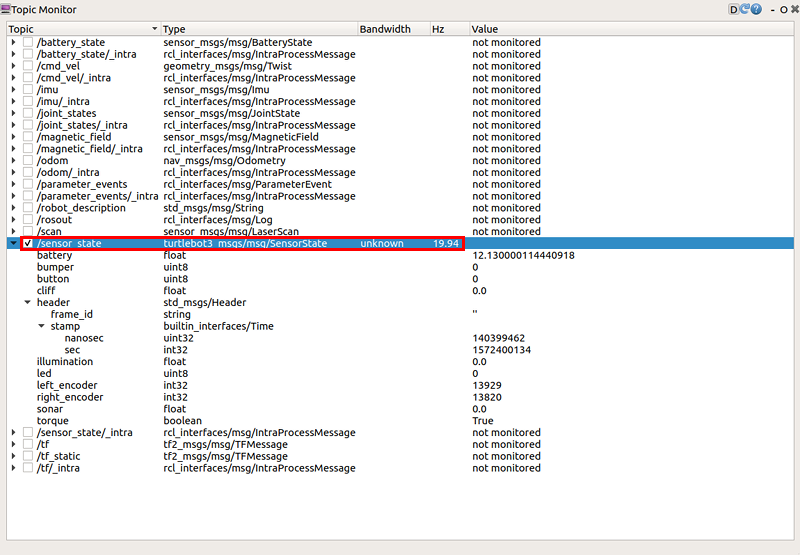
- [Remote PC] 点中话题左侧的复选框
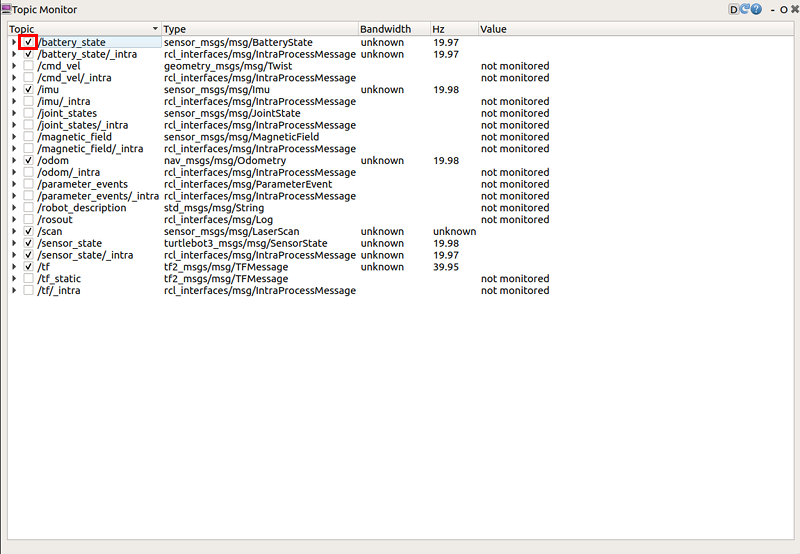
/battery_state话题列出了与电池状态有关的信息,如当前电压和剩余电量

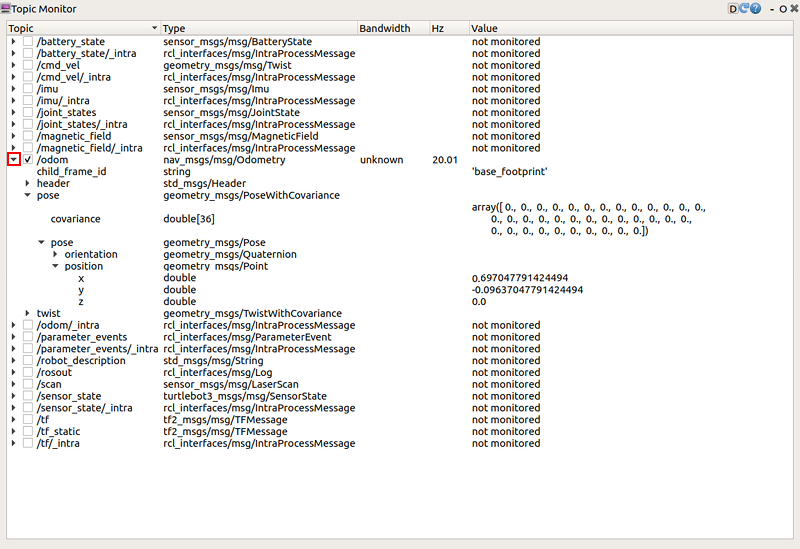
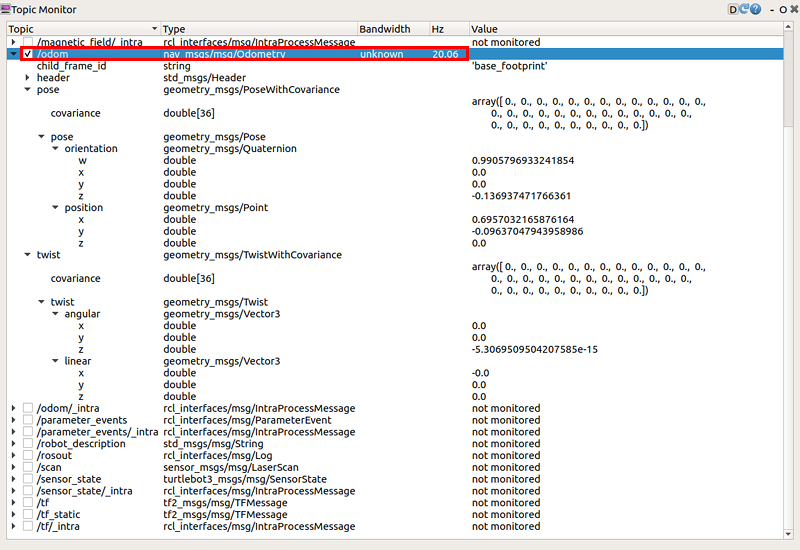
/odom话题代表Turtlebot3的里程状态,其通过编码器的数据来确定方向以及位置
/sensor_stateindicates a message the encoder values, battery and torque
/scan列出了LDS雷达当前的数据,如angle_max and min, range_max and min, indicates, ranges
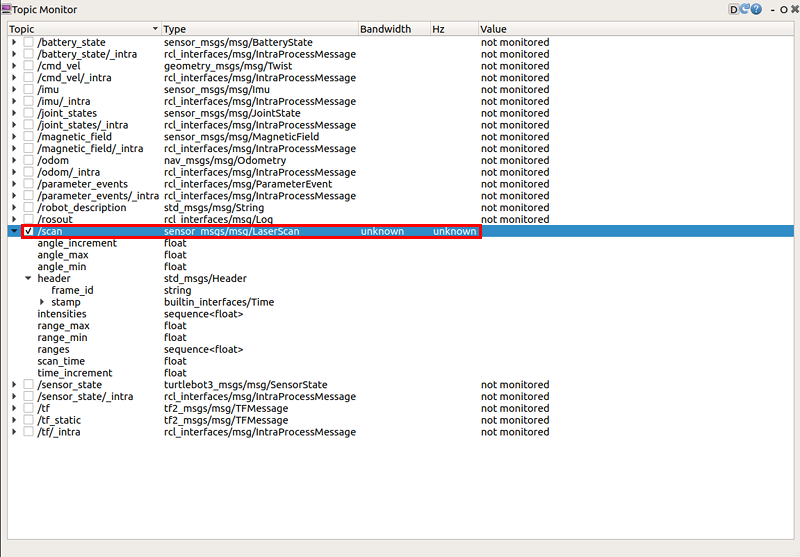
- 同时亦可以在rqt界面上其他话题的信息
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号