



















linorobot入门教程-建图
linorobot入门教程-建图
说明:
- 介绍如何进行SLAM建图
步骤:
- 机器人电脑,打开2个终端
- 第一个终端:
roslaunch linorobot bringup.launch
- 第二个终端:
roslaunch linorobot slam.launch
- 开发电脑,打开2个终端:
- 第一个终端:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
- 第二个终端:
roscd lino_visualize/rviz
rviz -d slam.rviz
- 使用键盘控制机器人在需要建图的区域运动
- 如图:

- 在机器人电脑上,保存地图:
rosrun map_server map_saver -f ~/linorobot_ws/src/linorobot/maps/map
- 检查地图目录
roscd linorobot/maps
ls -a map.pgm map.yaml
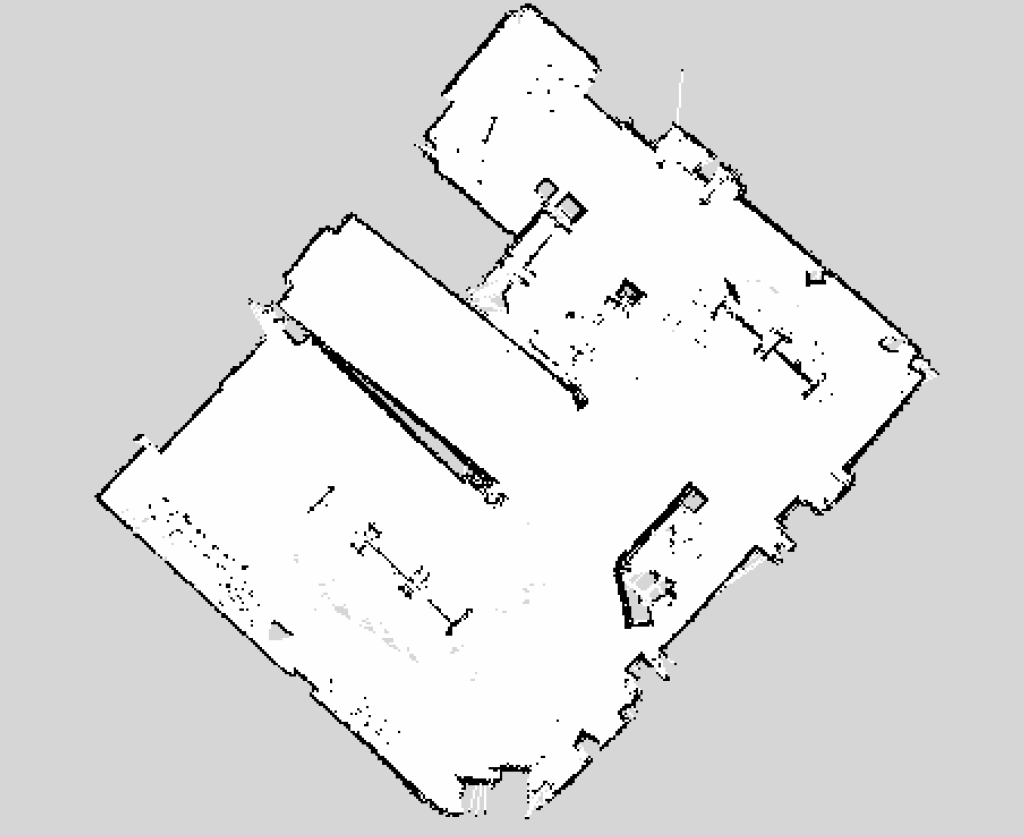
- 可以通过图片软件打开map.pgm
- 如图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号